




















HITGoЁЊЁЊжЧФмЯѓЦхгщРжЦНЬЈЁО2ЁП
ЕкШ§еТ HITGoЯЕЭГЪЕЯж
3.1 НчУцПижЦЯЕЭГ
ЯЕЭГНјГЬЪБађШчЭМ3-1ЫљЪОЃЌЮЊСЫЪЙЕУгУЛЇФмЙЛИќКУЕиПижЦБОЯЕЭГЕФСїГЬЃЌИјгшгУЛЇИќКУЕиЬхбщЃЌБОЯЕЭГАќКЌСЫЪЙгУQtБраДЕФЭМаЮНЛЛЅНчУцЁЃ

QtЪЧвЛИіПчЦНЬЈC++ЭМаЮгУЛЇНчУцгІгУГЬађПЊЗЂПђМмЃЌгЕгажюЖрЕФгХЪЦЃК
1ЁЂгХСМЕФПчЦНЬЈЬиад
QtжЇГжЯТСаВйзїЯЕЭГЃКMicrosoft Windows 95/98ЃЌMicrosoft Windows NTЃЌLinuxЕШЁЃ
2ЁЂУцЯђЖдЯѓ
QtЕФСМКУЗтзАЛњжЦЪЙЕУQtЕФФЃПщЛЏГЬЖШЗЧГЃИпЃЌЖдгкгУЛЇПЊЗЂРДЫЕЪЧЗЧГЃЗНБуЕФЁЃ
3ЁЂЗсИЛЕФAPI
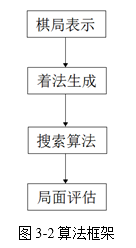
QTгЕгагбКУЗсИЛЕФНчУцПтЃЌПЊЗЂЦ№РДМђЕЅЃЌЭЌЪБQtЮЊЙуДѓПЊЗЂепЬсЙЉСЫУтЗбЖјгжгбКУЕФМЏГЩПЊЗЂЛЗОГЃЌвВВЛгУГаЪмЬЋДѓЕФГЩБОЁЃзюжеЕФгУЛЇНчУцШчЭМ3-2ЫљЪОЃК

ЭМ3-2 гУЛЇНчУц
ОЙ§ЩшМЦQtНчУцПижЦЯЕЭГОпгавдЯТЙІФмЃК
ВЫЕЅ-АяжњЃКНщЩмећИіЯЕЭГЕФВйзїСїГЬКЭЪЙгУВНжшЁЃ
ВЫЕЅ-ЙигкЃКЙигкЮвУЧЭХЖгЕФвЛаЉЛљБОаХЯЂЁЃ
аТОжЃКдкФуИеНјШыНчУцЛђепЯыШЮвтЪБПЬЯывЊжиаТдйРДвЛОжЕФЪБКђЃЌЕуЛїаТОжАДХЅЁЃ
ШЫШЫЖдеНФЃЪНЃКМДгУЛЇПЩвдЭЈЙ§ЛЅСЊЭјКЭдЖДІЪЙгУHITGo APPЕФгбШЫНјааНЛеНЁЃ
ШЫЛњЖдеНФЃЪНЃКПижЦАхЛсЭЈЙ§ЫуЗЈЖдгУЛЇЕФзпЗЈНјааЗжЮіЃЌШЛКѓзіГізюКУЕФЗНАИдкЭЈЙ§ЛњаЕЪжгІЖдЁЃ
ШЯЪфЃКдкЖдеНЙ§ГЬжаЃЌФуПЩвдбЁдёШЯЪфЃЌетЪБНчУцЕЏГіЁАyou outЃЁЁАЕФЖдЛАПђЃЌЭЌЪБГЬађЛсздЖЏЛжИДГЩаТОжзДЬЌЁЃ
ФбЖШбЁдёЃКЖдеНжЎЧАЃЌПЩбЁдёЖдеНФбЖШЁЃ
ШЗШЯЃКЕБФуЯТЭъвЛВНЦхКѓЃЌБиаыЕуЛїШЗШЯАДХЅЃЌетЪБГЬађВХФмЦєЖЏЩуЯёЭЗЖдЦхХЬНјааЪЖБ№ЃЌЛёЕУгУЛЇЕФзпЗЈЁЃ
3.2жЧФмзХЗЈВњЩњЯЕЭГ
AlphaBetaМєжІЫуЗЈЪЧЕБНёжаЙњЯѓЦхЫуЗЈжаеМОнжїСїЕиЮЛЕФЫуЗЈЁЃБОзїЦЗЛљгкМєжІЫуЗЈЪЕЯжСЫжЧФмзХЗЈЕФВњЩњЁЃ
ГЬађЕФЛљБОПђМмЃК
ДгГЬађЕФНсЙЙЩЯНВЃЌДѓЬхЩЯПЩвдНЋзХЗЈВњЩњВПЗжЛЎЗжЮЊЫФДѓСїГЬЃКЦхОжБэЪОЁЂзХЗЈЩњГЩЁЂЫбЫїЫуЗЈЁЂОжУцЦРЙР[4]ЃЌШчЭМ3-2ЫљЪОЁЃ
1ЁЂЦхОжБэЪО
ЖдгкЦхХЬЕФБэЪОЃЌВЩгУСЫДЋЭГЕФНЯЮЊМђЕЅЕФЁАЦхХЬЪ§зщЁБЁЊЁЊМДгУвЛИі9*10ЕФЪ§зщРДДцДЂЦхХЬЩЯЕФаХЯЂЁЃ
2ЁЂзХЗЈЩњГЩ
ВЩгУЕФЛљБОЫМЯыЪЧБщРњећИіЦхХЬЃЌЕБЗЂЯжгаЕБЧАЯТЦхЗНЕФЦхзгЪБОЭИљОнЫќЪЧКЮжжЦхзгЖјЯргІЕиевГіЦфЫљгаКЯЗЈзХЗЈЃЌШЛКѓДцШызХЗЈЖгСаЁЃЁАКЯЗЈзХЗЈЁБАќРЈИїЦхзгАДЦфаазгЙцдђаазгЁЂаазгВЛФмдНГіЦхХЬНчЯоЁЂНЋЫЇВЛФмХіУцЕШЁЃ
3ЁЂЫбЫїЫуЗЈ
ГЬађжажБНгНшМјСЫAlpha-BetaЫбЫїЫуЗЈВЂИЈвдСЫРњЪЗЦєЗЂЁЃЪзЯШЖдгкЦхРргЮЯЗДцдквЛПУЁАВЉоФЪїЁБЁЊЪїЕФУПвЛИіНсЕуДњБэЦхХЬЩЯЕФвЛИіОжУцЃЌЖдУПвЛИіОжУцЃЈНсЕуЃЉИљОнВЛЭЌЕФзпЗЈгжВњЩњВЛЭЌЕФОжУцЃЈЩњГіаТЕФНсЕуЃЉЃЌШчДЫВЛЖЯжБЕНдйЮоПЩбЁдёЕФзпЗЈЃЈЦхОжНсЪјЃЉЁЃетОЭЪЧЁАзюДѓ-зюаЁЁБЕФЛљБОЫМЯыЁЃФуПДЕНФГИіОжУцгаПЩФмВњЩњКмдуИтЕФОжУцЪБЃЌФугІЕБСЂПЬЭЃжЙЖдЦфЪЃгрзгНсЕуЕФЗжЮіЃЌетбљвЛРДБуПЩвдКмДѓГЬЖШЩЯМѕЩйЫбЫїЕФЙЄзїСПЃЌЬсИпЫбЫїаЇТЪЁЃетГЦЮЊЁАЪїЕФМєВУЁБЁЃЁАзюДѓ-зюаЁЁБЕФЫМЯыдйМгЩЯЁАЖдЪїЕФМєВУЁБОЭЪЧAlpha-BetaЫбЫїЫуЗЈЕФКЫаФЁЃ
4ЁЂОжУцЦРЙР
ОжУцЦРЙРдђИКд№ЖдЫбЫїЕФФкШнНјааХаЖЯЦРМлЁЃдкжаЙњЯѓЦхжаЫљвЊПМТЧЕФзюЛљБОЕФМИИівђЫиАќРЈШчЯТЫФЕуЃК
(1)згСІзмКЭЃКзгСІЪЧжИФГвЛЦхзгБОЩэЫљОпгаЕФМлжЕЁЃ
(2)ЦхзгЮЛжУЃКЦхзгЮЛжУЪЧжИФГвЛЗНЕФЦхзгдкЦхХЬЩЯЫљеМОнЃЈПижЦЃЉЕФЮЛжУЁЃ
(3)ЦхзгЕФЛњЖЏадЃКЦхзгЕФЛњЖЏаджИЦхзгЕФСщЛюЖШЃЈПЩвЦЖЏадЃЉЁЃ
(4)ЦхзгЕФЯрЛЅЙиЯЕЃКетвЛЕуЕФЗжЮіНЯЮЊИДдгЃЌвђЮЊвЛИіЦхзггыВЛЭЌЕФзгжЎМфЭљЭљДцдкЖржиЙиЯЕ
ЖдгкзгСІДђЗжКЭПижЦЧјгђДђЗжЃЌжЛвЊБщРњЦхХЬЃЌЕБгіЕНЦхзгЪБМђЕЅЕиШЅВщЪТЯШЖЈвхКУЕФЁАзгСІМлжЕБэЁБКЭЁАПижЦЧјгђМлжЕБэЁБЃЌШЁГіЯрЖдгІЕФжЕНјааРлМгМДПЩЖдгкЛњЖЏадДђЗжЃЌашвЊЧѓГіИїИізгзмЙВгаЖрЩйжжзпЗЈЃЌШЛКѓИљОнИїИізгЫљВЛЭЌЕФЛњЖЏадМлжЕУПЖрвЛжжзпЗЈОЭМгвЛДЮЯргІЕФЗжЪ§ЁЃИљОнЙиЯЕБэРДОпЬхПМВьЦхзгЕФЯрЛЅЙиЯЕЃЌНјааЙиЯЕДђЗжЁЃ
3.3 ЦхХЬЭМЯёДІРэЯЕЭГ
дкБОзїЦЗжаЃЌЖдгУЛЇЯТЦхзХЗЈЕФМьВтЪЧЭЈЙ§дЫаагкЧЖШыЪНЯЕЭГжаЕФЭМЯёДІРэЫуЗЈЭъГЩЕФЃЌЫуЗЈЕФЪОвтЭМШчЭМ3-2ЫљЪОЁЃ
ЫуЗЈВНжшПЩвдЙщНсЮЊЃК

1ЁЂЭЈЙ§USBЩуЯёЭЗЛёШЁШЫзпзгЧАЦхХЬзДПівдМАзпзгКѓЦхХЬзДПіЃЌДцДЂжЁЭМЯёЁЃ
ЕБгУЛЇАДЯТзпЦ№ШЗШЯМќШЗШЯвбОзпЭъзгЛђепЛњаЕБлЭъГЩЖЏзїЃЌГЬађНЋДгЪгЦЕСїжаЖСШЁвЛжЁЪ§ОнЃЌБЃДцзїЮЊД§ДІРэЕФдДЭМЯёЁЃдЪМжЁЪЧгУЛЇзХзгЧАЕФЭМЯёЃЌЖдБШжЁЪЧгУЛЇзХзгКѓЕФЭМЯёЁЃ
2ЁЂЪЙгУжажЕТЫВЈЫуЗЈНјааЦНЛЌДІРэЃЌШЅГ§дыЩљгАЯьЁЃ
жажЕТЫВЈЪЧЛљгкХХађЭГМЦРэТлЕФвЛжжФмгааЇвжжЦдыЩљЕФЗЧЯпадаХКХДІРэММЪѕЁЃдкБОЫуЗЈжаЃЌгЩгкжмЮЇЛЗОГЕФдЕЙЪЃЌдыЩљВЛПЩБмУтЃЌБШШчНЗбЮдыЩљЕШЁЃЖдзЊЛЏЮЊHSVЕФПеМфдЪМжЁКЭЖдБШжЁШ§ИіЭЈЕРЗжБ№НјаажажЕТЫВЈЃЌПЩгааЇТЫГ§ЦфдыЩљЁЃ
3ЁЂЩшЖЈЗЇжЕЃЌЗжБ№ЖддЪМжЁКЭЖдБШжЁЩшЖЈЗЇжЕНјааЗжРрЃЌВЂЭЈЙ§ЖдЦхХЬНсЙЙЖЈЮЛЪЖБ№зюжеЕУЕНШЯЕУзіЗЈЁЃ
ОЙ§ВЩМЏЁЂзЊЛЛЩЋВЪПеМфКЭжажЕТЫВЈШЅГ§ИїжжШХТвдыЩљКѓЕФЭМЯёЃЌНЋНјааЗЇжЕЩшЖЈгыХаОіЁЃЭЈЙ§ЖдЕЅЖРЦхзгНјааЪдбщЃЌИљОнгУЛЇЗНЦхзгЕФШ§ЭЈЕРЪ§жЕЪЕМЪЧщПіЃЌЩшЖЈHЁЂSЁЂVШ§ИіЭЈЕРЕФИїздЗЇжЕЃЌвдБугкЕчФдЗНЕФКкзгЗжПЊЁЃ
гЩгкЩуЯёЭЗвРППжЇМмжЇГХЃЌгыбЧПЫСІЦхХЬЕФЯрЖдЮЛжУЙЬЖЈЃЌЙЪЖјИїИіЦхзгЮЛжУдкЪТЯШвбОПЩвдШЗЖЈЁЃЮЊУПИіЦхзгЮЛжУЩшЖЈЯрЖдгкЭМЯёЕФЗЖЮЇЃЌЩшЖЈХаОігаКьзгЗЇжЕЃЌЕБФГвЛИіЮЛжУЯёЫижЕзмКЭИпгкДЫжЕЪБЃЌХаЖЯЮЊгаКьзгЃЌЮЛжУОиеѓЖдгІЕФБфСПжЕЩшЮЊ1ЁЃЕБФГвЛИіЮЛжУЯёЫижЕзмКЭЕЭгкДЫжЕЪБЃЌХаЖЯЮЊЮоКьзгЃЌЮЛжУОиеѓЯргІЕФБфСПжЕЩшЮЊ0ЁЃ
НЋЖдБШжЁОиеѓМѕШЅГѕЪМжЁОиеѓЃЌжЕЮЊ1ЕФЮЛжУЮЊгУЛЇЕФТфНХЕуЃЌжЕЮЊ-1ЕФЮЛжУЮЊгУЛЇЕФГіЗЂЕуЁЃ
4ЁЂНјааЪЖБ№НсЙћКЯЗЈадМьВтЃЌМѕаЁДэЮѓИХТЪЁЃ
гЩгкЩуЯёЭЗБОЩэЖСШЁЕФЮЪЬтЃЌЩЯЪіЫуЗЈгаМЋаЁЕФПЩФмадЕМжТОиеѓЪЖБ№ДэЮѓЁЃашвЊМгШыКЯЗЈадМьВтЕФЛЗНкЁЃОпЬхМьВтЗНЗЈЃКЖдБШЖдБШжЁОиеѓМѕШЅГѕЪМжЁОиеѓКѓЕФНсЙћОиеѓЃЌШчЙћгаШ§ИіЛђепШ§ИівдЩЯдЊЫиВЛЮЊ0ЃЌдђБэЪОЩуЯёЭЗЫуЗЈВПЗжГЬађВњЩњЮЪЬтЃЌжиаТЖСШЁЖдБШжЁЃЌдйДЮНјааЫуЗЈећИіВНжшЁЃ
ОЙ§ЩуЯёЭЗЭМЯёДІРэЫуЗЈКѓЃЌгУЛЇЕФзпЗЈПЩвдгУЫФИіЪ§зжБэЪОЃКГіЗЂЕуЕФXзјБъЃЌГіЗЂЕуЕФYзјБъЃЌТфзгЕуЕФXзјБъЃЌТфзгЕуЕФYзјБъЁЃ
3.4 ЛњаЕБлдЫЖЏЯЕЭГ
3.4.1ЕМЙьЛЌЬЈЕФПижЦ
ЮЊЪЙЛњаЕзІФмзМШЗЖЈЮЛЕНФПБъЦхзгЮЛжУЃЌашвЊЖдXЁЂYЁЂZШ§зщЕМЙьЛЌЬЈНјаазМШЗПижЦЃЌЦфЪЕжЪОЭЪЧЖдЕчЛњЕФОЋШЗПижЦЁЃ
БОЩшМЦВЩгУЕФжДааВПМўЮЊ57СНЯрЛьКЯЪНВННјЕчЛњЁЃСНЯрВННјЕчЛњЪОвтЭМШчЭМ3-3ЫљЪОЃЌЖЈзгЩЯгаАЫИіШЦгаЯпШІЕФЬњаФДХМЋЃЌАЫИіЯпШІДЎНгГЩAЁЂBСНЯрШЦзщЃЌУПИіЖЈзгДХМЋБпдЕгаЖрИіаЁГнЁЃзЊзггЩСНЖЮгаГнЛЗаЮзЊзгЬњаФЁЂзАдкзЊзгЬњаФФкВПЕФЛЗаЮДХИжМАжсГаЁЂжсзщГЩЃЌНЋЛЗаЮДХИжбижсЯђГфДХЁЃ

ГѕЪМзДЬЌЃЌAЯрЭЈЕчВњЩњБЃГжСІОиЃЌBЯрЭЈЕчЃЌЖЈзгДХГЁа§зЊ90ЖШЃЌЮќв§зЊзга§зЊ1/4ГнОрЃЈ30ЖШЃЉЃЌ/AЯрЭЈЕчЁЂ/BЯрЁЂAЯрЭЈЕчЖЈзгДХГЁИїа§зЊ90ЖШЃЌИїЮќв§зЊзга§зЊ1/4ГнОрЃЈ30ЖШЃЉЁЃ4ВНвЛИібЛЗКѓЙВзЊЙ§вЛИіГнОр120ЖШЃЌ12ВНКѓзЊзга§зЊвЛжмЁЃУПвЛДЮНівЛЯрШЦзщЭЈЕчЃЌЫФХФвЛИібЛЗЁЃГЦжЎЮЊЕЅЫФХФЙЄзїзДЬЌЁЃЭЌЪБВННјЕчЛњЛЙОпгаЫЋЫФХФЁЂЕЅАЫХФЁЂЫЋАЫХФЕШЙЄзїзДЬЌЁЃ
дкСЫНтСНЯрВННјЕчЛњПижЦдРэКѓЃЌашЖдЕчЛњНјааЧ§ЖЏЁЃЧ§ЖЏЦїЕФдРэЭМШчЭМ3-4ЫљЪОЁЃНгПкЕчТЗгУЙтЕчИєРыЗНЪННЋдЫЖЏПижЦЦїКЭЧ§ЖЏЦїСЌНгЦ№РДЃЌБмУтЧ§ЖЏЦїжаЕФДѓЕчСїИЩШХаХКХОЕиЯпДмШыдЫЖЏПижЦЦїЕчТЗЁЃЛЗаЮЗжХфЦїНЋТіГхМАЗНЯђаХКХАДЩшЖЈЕФНкХФЗНЪНЃЌзЊЛЛЮЊЙІЗХЙмЕФЕМЭЈКЭНижЙаХКХЃЌДгЖјПижЦИїЯрШЦзщЕФЭЈЕчКЭЖЯЕчЁЃЙІТЪЗХДѓЦїНЋЕчдДЙІТЪзЊЛЛЮЊЕчЛњЪфГіЙІТЪЧ§ЖЏИКдидЫЖЏЁЃ
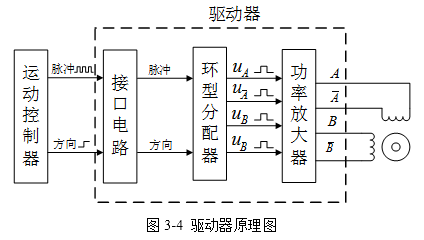
дкЪЕМЪжЦзїжаЃЌБОЩшМЦЪЙгУаЭКХЮЊZD-6560-V4C 57ВННјЕчЛњЧ§ЖЏЦїЃЌЧ§ЖЏЦїЕФНгПкЖЈвхШчЭМ3-5ЫљЪОЁЃ
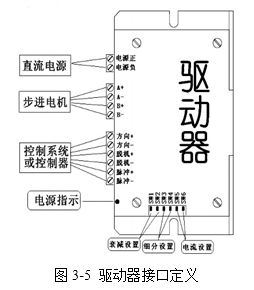
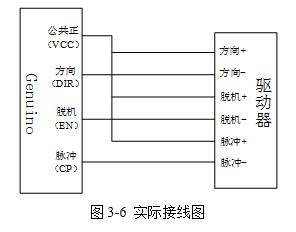
ЪЕМЪНгЯпШчЭМ3-6ЫљЪОЁЃжЛвЊЕЅЦЌЛњИјЧ§ЖЏЦїКЯЪЪЕФТіГхЦЕТЪЃЌеМПеБШКЭЪфГіТіГхЕФИіЪ§ЃЌОЭФмОЋШЗПижЦВННјЕчЛњЕФа§зЊНЧЖШЃЌДгЖјОЋШЗПижЦЕМЙьЛЌЬЈЕФвЦЖЏОрРыЁЃ
3.4.2ЛњаЕзІЕФПижЦ
ЛњаЕзІЕФПижЦЪЕжЪЩЯОЭЪЧЖдЖцЛњЕФПижЦЁЃЖцЛњЪЧвЛжжЮЛжУЃЈНЧЖШЃЉЫХЗўЕФЧ§ЖЏЦїЃЌЪЪгУгкЛњаЕзІМаГжЦхзгЁЃ
ЖцЛњЕФПижЦвЛАуашвЊвЛИі20msзѓгвЕФЪБЛљТіГхЃЌИУТіГхЕФИпЕчЦНВПЗжвЛАуЮЊ0.5ms~2.5msЗЖЮЇФкЕФНЧЖШПижЦТіГхВПЗжЁЃвдБОЩшМЦЪЙгУЕФ180ЖШНЧЖШЫХЗўЮЊР§ЃЌЖдгІЕФПижЦЙиЯЕШчБэ3-1ЫљЪОЁЃ
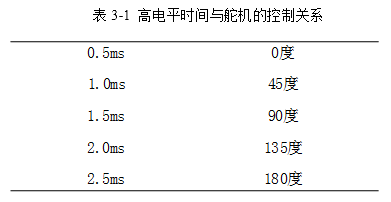
Бэ3-1 ИпЕчЦНЪБМфгыЖцЛњЕФПижЦЙиЯЕ
вђДЫЃЌЕЅЦЌЛњжЛвЊИјЖцЛњжмЦкЮЊ20msЃЌеМПеБШКЯЪЪЕФPWMаХКХЃЌОЭФмПижЦЖцЛњзЊЙ§ЕФНЧЖШЃЌДгЖјОЋШЗПижЦЛњаЕзІЖдЦхзгЕФМаГжзДЬЌЁЃ
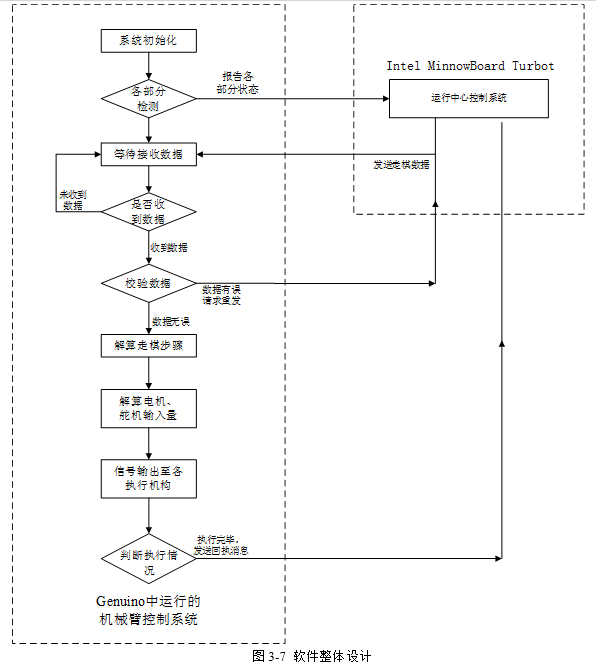
3.4.3ЯЕЭГШэМўЩшМЦ
ШэМўећЬхЩшМЦШчЭМ3-7ЫљЪОЁЃXЁЂYЁЂZШ§зщЕМЙьЛЌЬЈКЭЛњаЕзІЕФећЬхПижЦгЩGenuinoПЊЗЂАхЭъГЩЁЃЩЯЕчКѓЃЌПЊЗЂАхЪзЯШНјааЯЕЭГГѕЪМЛЏЃЌШЛКѓМьВтИїВПЗжЪЧЗёе§ГЃЙЄзїЃЌШєгаЙЪеЯЃЌдђЯђIntel MinnowBoard TurbotзїЮЊЯЕЭГжааФПижЦЩшБИБЈДэЁЃШєе§ГЃЃЌдђПЊЪМЭЈЙ§ДЎПкНгЪеРДздЯЕЭГжааФПижЦЩшБИЕФЪ§ОнЁЃетРяЕФЪ§ОнАќРЈАќКЌгаЦхзгзпЗЈЕФЪ§ОнКЭвЛИіаЃбщЪ§ОнЁЃGenuinoЛёЕУЪ§ОнКѓЪзЯШЖдЪ§ОнНјаааЃбщЃЌШєЪ§ОнгаЖЊЪЇЛђепгаДэЮѓЃЌдђЭЈЙ§ДЎПкЯђжааФПижЦЩшБИБЈДэВЂЧыЧѓжиЗЂЪ§ОнЃЌжБЕНЕУЕНе§ШЗЕФЪ§ОнЁЃШЛКѓЃЌGenuinoЭЈЙ§вЛЯЕСаЫуЗЈНЋЕУЕНЕФЪ§ОнзЊЛЛЮЛXЁЂYЁЂZШ§зщЕМЙьЛЌЬЈЧ§ЖЏЦїЕФЪфШыСПКЭЛњаЕзІЕФЪфШыСПЁЃзюКѓЃЌЛњаЕБлдЫЖЏЭъГЩКѓGenuinoЗЂЫЭзпЦхвбОЭъГЩЕФБъжОЃЌШЛКѓЕШД§ЯТвЛДЮзпЦхЪ§ОнЕФЪфШыЁЃ
 |  |
ЗжЯэШУИќЖрШЫПДЕН 
ЭЦМідФЖС
ДЋУНЭЦМі
 @УНЬхШЫЃЌаТЮХБЈЕРБ№ШЮад
@УНЬхШЫЃЌаТЮХБЈЕРБ№ШЮад ЭјеОдЫгЊеп етаЉ"КьЯп"ВЛФмВШЃЁ
ЭјеОдЫгЊеп етаЉ"КьЯп"ВЛФмВШЃЁ вЛЭМзнРРжаЙњЭјТчЪгЬ§аавЕ
вЛЭМзнРРжаЙњЭјТчЪгЬ§аавЕ
ЯрЙиаТЮХ
- В§НОйАьЁАШЋУёНЁЩэБЁБЬхг§ЯЕСаБШШќ ЗсИЛШКжквЕгрЩњЛю
- дкЁАКЃЕзЁБЯТЯѓЦхЃПецЕФЃЁЦжЖЋетИіЙЋдАОйАьСЫШЋЙњЪзИіЁАКЃЕзЦхЭѕељАдШќЁБЃЁ
- ЯѓЦхМзМЖСЊШќОйАьЭјТчМОЧАШќ
- ЖиЛЏЪаПЊеЙ2020ЁАНЖЋХнВЫБЁБЯѓЦхЭјТчПьЦхЭХЬхЖдПЙШќ
- ШЋЙњЯѓЦхзЈвЕвЕгрШУЯШЬєеНШќЕкСљГЁЃКНЏДЈЛ§Зж4-0ЭъЪЄЮтНЈЧП
- ЬьЖыЙЋАВзщжЏПЊеЙгаТДКОЏгЊЮФЬхЛюЖЏ
- ФкУЩЙХЛюЬЌДЋГаУЩЙХЯѓЦх
- ШЋЙњЯѓЦхЁАУёМфЦхЭѕЁБељАдШќФўЯФШќЧјЁАЦхЭѕЁБЕЎЩњ
- ЯФИеЃКЦхХЬЫфаЁЬьЕиПэ
- ШЋЙњЕкЪЎНьВадЫЛсЯѓЦхБШШќРПЊеНФЛ
ПЭЛЇЖЫЯТди
ШЫУёШеБЈЩчИХПі | ЙигкШЫУёЭј | БЈЩчеаЦИ | еаЦИгЂВХ | ЙуИцЗўЮё | КЯзїМгУЫ | ЙЉИхЗўЮё | Ъ§ОнЗўЮё | ЭјеОЩљУї | ЭјеОТЩЪІ | аХЯЂБЃЛЄ | СЊЯЕЮвУЧ
ЗўЮёгЪЯфЃКkf@people.cn ЮЅЗЈКЭВЛСМаХЯЂОйБЈЕчЛАЃК010-65363263 ОйБЈгЪЯфЃКjubao@people.cn
ЛЅСЊЭјаТЮХаХЯЂЗўЮёаэПЩжЄ10120170001 | діжЕЕчаХвЕЮёОгЊаэПЩжЄB1-20060139
ЙуВЅЕчЪгНкФПжЦзїОгЊаэПЩжЄЃЈЙуУНЃЉзжЕк172КХ | ЛЅСЊЭјвЉЦЗаХЯЂЗўЮёзЪИёжЄЪщЃЈОЉЃЉ-ЗЧОгЊад-2016-0098
аХЯЂЭјТчДЋВЅЪгЬ§НкФПаэПЩжЄ0104065 | ЭјТчЮФЛЏОгЊаэПЩжЄ ОЉЭјЮФ[2020]5494-1075КХ | ЭјТчГіАцЗўЮёаэПЩжЄЃЈОЉЃЉзж121КХ | ОЉICPжЄ000006КХ | ОЉЙЋЭјАВБИ11000002000008КХ
ШЫ Уё Эј Ац ШЈ Ыљ га ЃЌЮД О Ъщ Уц Ък ШЈ Нћ жЙ ЪЙ гУ
Copyright © 1997-2021 by www.people.com.cn. all rights reserved




-
ЦРТл

-
ЙизЂ
ЮЂаХЮЂВЉПьЪж
 ЕквЛЪБМфЮЊФњЭЦЫЭШЈЭўзЪбЖ
ЕквЛЪБМфЮЊФњЭЦЫЭШЈЭўзЪбЖ
 БЈЕРШЋЧђ ДЋВЅжаЙњ
БЈЕРШЋЧђ ДЋВЅжаЙњ
 ЙизЂШЫУёЭјЃЌДЋВЅе§ФмСП
ЙизЂШЫУёЭјЃЌДЋВЅе§ФмСП
