




















HITGo――智能象棋娱乐平台
摘要:象棋作为中国的文化精髓之一,始终在人们的生活中扮演着不可或缺的文化因素。本文基于Intel Minnow Board Turbot 嵌入式开发平台和Genuino 101开发板,开创性地将象棋国粹文化与现代科技相结合,实现了一款支持多种对战方式和功能的象棋娱乐平台HITGo。
HITGo项目使用计算机视觉处理技术编写处理算法实现棋盘图像信息的识别,集成AlphaBeta剪枝人工智能算法实现智能着法、采用网络数据传输以及自动控制理论实现了对战平台的硬件框架。HITGo支持“人机对战”、“远程人人对战”两种对战模式,用户可以通过简洁的人机交互界面进行模式选择与控制。不同的游戏模式下,所选对手通过HITGo机械臂在棋盘上移动真实的棋子实现与用户进行真实象棋对战。HITGo项目的实现,在给予用户最舒适和最真实的象棋游戏感受的同时,也为用户提供了一种全新的象棋对战体验。
关键词:计算机视觉,象棋娱乐平台,自动控制
ABSTRACT
As a marrow of Chinese culture, Chinese Chess has always acted as an indispensable role in our daily lives. Based on Intel Minnow Board Turbot and Genuino 101, HITGo platform combines the marrow culture and the advanced technologies innovatively, realizing a new chess entertainment platform with multiple battle ways and functions.
HITGo uses computer vision processing technology and writes processing algorithm to identify chessboard image information. It integrates AlphaBeta artificial intelligence algorithm to achieve intelligently playing chess, Internet-communication theory and automatic control technologies to realize the hardware framework of the game. HITGo supports “Person to Machine” and “Remote Person to Person” two kinds of battle mode, of which the user can select one through simple interactive interface. In different game modes, the opponent selected could chess with user vividly by controlling the manipulator to move the real piece. The realization of the HITGo project not only gives the user the most comfortable and realistic gaming experience but also provides user a brand new chess experience.
Key words: Computer visual technology, platform for Chinese Chess entertainment, automatic control theory
第一章 绪论
1.1 课题研究的背景与意义
在当今社会,象棋虽然已经受到了广泛的发展和传播,但是其游戏形式仅限于实物以及纯软件等形式,并没有在实际上受到科技水平提高的促进,也没有新的处理技术被广泛为象棋的发展上面来。不管是在技术应用还是用户体验方面,都需要创新和进步来激发象棋的发展。
与此同时,研究技术应用和象棋的结合更会促进相应的技术发展。人工智能是计算机学科的一个分支,它企图了解智能的实质,并产生出一种新的能与人类智能相似的方式作出反应的智能机器[1]。人工智能作为当今的研究热点之一,被广泛地看做改变未来的关键技术之一。计算机博弈作为计算机人工智能的一个应用,也被人们所重视。进行HITGo的研究和搭建,让更多的人感受到人工智能带来的便捷与舒适,会引起社会对人工智能的更加重视,推动整个领域的发展。
1.2 国内外研究现状
目前人工智能的研究主要分为智能接口、数据挖掘、主体以及主体系统。下面将对这三个方面分别进行阐述[2]:
智能接口指研究如何使人们能够方便自然的与计算机进行交流。目前各种已经较为成熟的智能接口技术如文字识别、语音识别、图像识别已经开始实用于生活中。
数据挖掘就是从大量的、不完全的应用数据中提取出潜在有用的信息的过程。数据挖掘技术已经形成了三大支柱:数据库、人工智能和数理统计。
主题是具有意图、能力、选择等心态的实体,比对象更加有智能性。主体试图独立地去完成任务,而且可以和环境进行交互通信。目前对主体和多主体系统的研究主要集中在主体和多主体理论、主体之间的协作和协调、通信和交互技术等方面。
第二章 HITGo系统设计方案
2.1系统原理
HITGo象棋娱乐平台集成了多种相对较为成熟的处理技术和算法理论。
1、 决策算法:决策算法是人机对战模式的核心,本平台采用了当今处理象棋着法问题应用最为广泛的AlphaBeta剪枝算法。通过AlphaBeta算法,系统智能地对局势进行评价,搜索最佳方法。
2、 图像处理算法:运用计算机视觉库,编写图像处理算法使得对战平台具有根据棋盘识别人着棋方法的能力,使得用户能够真正地接触棋子和棋盘。
3、 机械臂控制理论:系统加入了机械臂控制系统,通过控制板向步进电机发送包含有下棋走法的指令,使得由三个方向的机械臂可以移动规定好的长度,从而实现了机械臂吃子和走子的功能。
4、 网络传输理论:系统加入了通过网络实现人人交战的技术。另一用户通过下载安卓APP客户端,通过互联网和棋盘前的用户进行对战。
同时,本系统包含了供电系统、电平转换系统来实现供电支持和通信支持。还包含图形界面,方便用户控制系统操作过程。
2.2 系统总体结构
系统硬件总体结构如图2-1所示。在2-1所示的系统总体结构中,首先用户通过控制界面选择工作模式,然后进行象棋对战,之后摄像头采集图像信息提取用户走棋数据,接着中控板将算法应对的走棋数据(人人对战模式为中控板通过互联网获得的手机客户端走棋数据)通过串口传至Genuino单片机,进而控制机械臂运动系统走棋。如此便可以进行象棋对战。为使整个系统软硬件结构分明,将整个作品分为三个模块进行介绍各个结构。
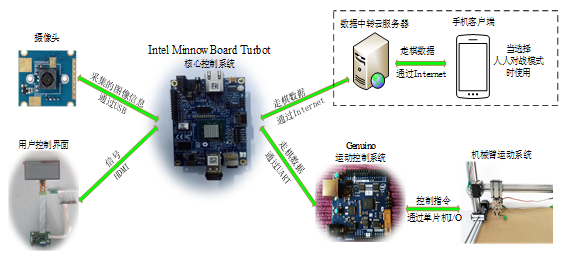
图2-1 图2-1 HITGo系统硬件总体结构
2.3 模块结构设计
2.3.1 棋盘及其图像采集装置
棋盘以及其图像采集装置如图2-2所示,一共包含了四个部分:棋子、棋盘、支撑杆、摄像头。摄像头在本系统中采用OV5640型号摄像头。由硬件实现了500万像素值,支持自动对焦、自动白平衡与自动曝光,FPS为15。本系统采用大小为585mm*525mm的亚克力板,厚度为7mm。棋盘内部单元间隔为37mm。棋盘通过雕刻展现在亚克力板上。棋子采用磁石棋子,直径实际测量值为2.2mm。
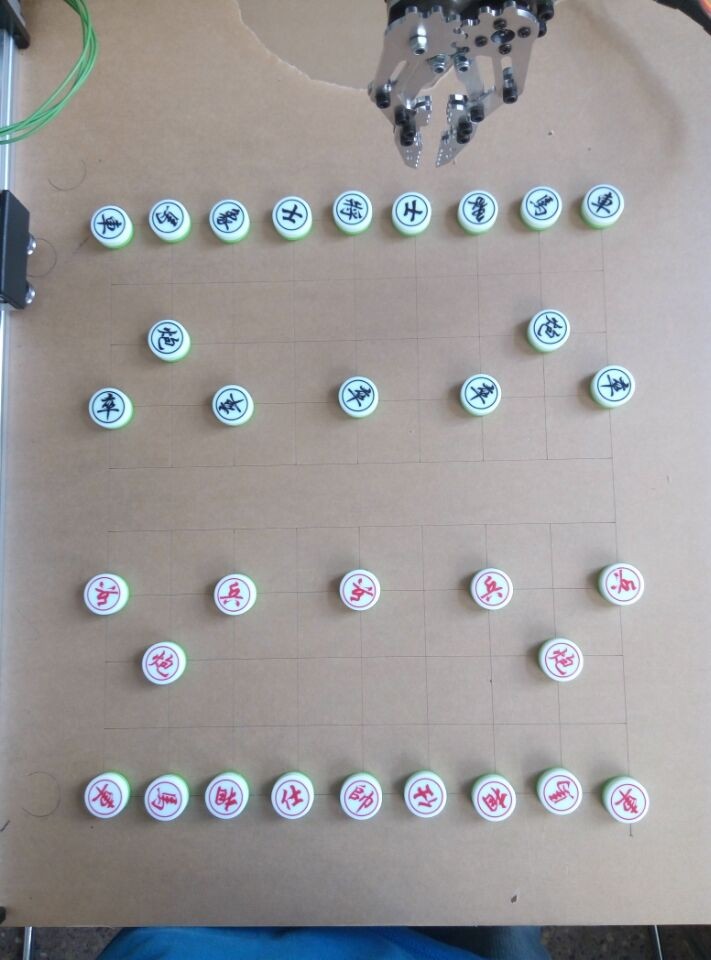
图2-2 棋盘及其采集装置
2.3.2 中心处理系统
中央处理部分由Intel MinnowBoard Turbot嵌入式系统开发板,Genuino开发板,显示屏、触摸屏等部分组成。
Intel MinnowBoard Turbot是一款Intel公司的嵌入式软硬件开源的开发板,性能十分强大。板子集成有Intel Atom 64位处理器,Intel集成显卡、USB接口、HDMI接口以及SPI接口和UART接口,支持多种操作系统。
Genuino是一款简单实用的控制器,在本作品中,主要完成接收Turbot板子发送的信息,经过分析处理控制驱动电机,最终实现机械臂的运动。Genuino通过UART串口和嵌入式开发板相连。
显示屏与触摸屏大小相同,如图2-3所示,均为7寸。显示屏通过HDMI接口与开发板相连,用于显示图形化界面。同时显示屏有亮度调节器,可方便的更改亮度,适应各种环境。触摸屏为电容式触摸屏,支持多点同时触摸,有较高的测量精度,获得用户触摸事件,执行相应的动作。

图2-3 显示器
2.3.3 机械臂运动装置
机械臂的硬件主要由三组单轴T形丝杠导轨滑台和一个机械爪构成。X轴、Y轴、Z轴三组单轴T形丝杠导轨滑台用于将机械爪精确定位到目标棋子位置,机械爪用于夹取棋子或放置棋子。整体硬件结构如图2-4所示。
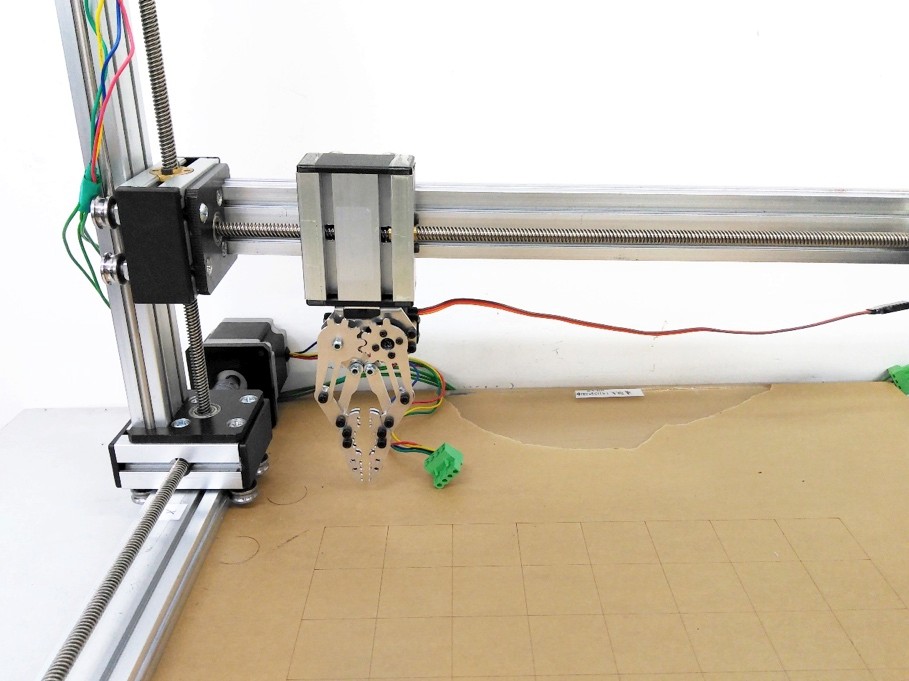
图 2-4 机械臂结构示意图
单轴T形丝杠导轨滑台由规格为0808的丝杠组成,及丝杠直径8mm,导程8mm,水平载重为60Kg,垂直载重为18Kg,完全满足夹取棋子所需要的要求。0808丝杠速度为1-66mm/s可调。X轴上的直线导轨有效行程为425mm,Y轴上的直线导轨的有效行程为325mm,Z轴上的直线导轨有效行程为225mm。
单轴T形丝杠导轨滑台由一个57步进电机驱动。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
机械爪,如图2-5所示,用于加持棋子。它由硬质铝合金制成,爪子整体长度为118mm,爪子张开时的最大整体宽度为107mm,闭合时的最大整体宽度为55mm,能有效夹持直径25mm的棋子。机械爪的动力由型号为MG996R的舵机提供,能产生11kg/cm(5V),15kg/cm (6.5V)的拉力,足够夹紧棋子使其在移动过程中不掉落。
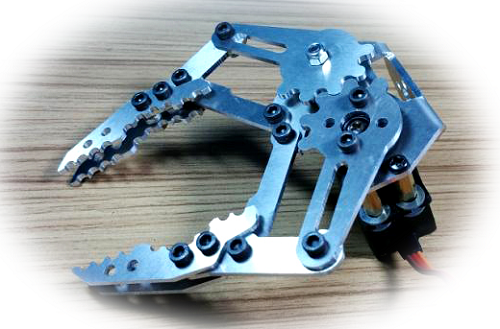
图2-5 机械爪
2.4 小结
本章节综述了整个系统内部实现原理,给出了整体的硬件连接结构框图,同时分模块地对各部分硬件其参数、性能的作了简单介绍。
 |
分享让更多人看到 
推荐阅读
传媒推荐
 @媒体人,新闻报道别任性
@媒体人,新闻报道别任性 网站运营者 这些"红线"不能踩!
网站运营者 这些"红线"不能踩! 一图纵览中国网络视听行业
一图纵览中国网络视听行业
相关新闻
人民日报社概况 | 关于人民网 | 报社招聘 | 招聘英才 | 广告服务 | 合作加盟 | 供稿服务 | 数据服务 | 网站声明 | 网站律师 | 信息保护 | 联系我们
服务邮箱:kf@people.cn 违法和不良信息举报电话:010-65363263 举报邮箱:jubao@people.cn
互联网新闻信息服务许可证10120170001 | 增值电信业务经营许可证B1-20060139
广播电视节目制作经营许可证(广媒)字第172号 | 互联网药品信息服务资格证书(京)-非经营性-2016-0098
信息网络传播视听节目许可证0104065 | 网络文化经营许可证 京网文[2020]5494-1075号 | 网络出版服务许可证(京)字121号 | 京ICP证000006号 | 京公网安备11000002000008号
人 民 网 版 权 所 有 ,未 经 书 面 授 权 禁 止 使 用
Copyright © 1997-2021 by www.people.com.cn. all rights reserved




-
评论

-
关注
微信微博快手
 第一时间为您推送权威资讯
第一时间为您推送权威资讯
 报道全球 传播中国
报道全球 传播中国
 关注人民网,传播正能量
关注人民网,传播正能量
