




















基于犯罪特征样本库与HMM的再犯罪预警系统
摘要: 随着当今社会的不断发展与人口的持续递增,社会治安形势不容任何松懈,这就要求社会治安措施的同步升级。此时,相关的行为识别与目标跟踪等技术应势而生,目前初步应用于一些城市的“天网”系统中,未来将全面铺开。而面对当前的高重复犯罪率,犯罪人员心理等问题又无法得到妥善解决的情况下,运用行为识别与目标跟踪技术进行再犯罪的预防与控制属必要之举,亦是行之有效的。本文创新性提出建立犯罪行为特征样本库的建立,并运用HMM与粒子滤波的跟踪算法实现对异常行为,特别是潜在的重复犯罪人员的监控,达到对重复犯罪行为的有效管控。
关键词: 重复犯罪率;HMM;犯罪特征样本库;粒子滤波
1.项目背景
1.1. 智能识别技术的迫切应用需求
行为识别与目标跟踪技术的兴起和发展与社会治安环境的迫切要求密不可分,多以视频监控为载体获得体现。国内“天网”系统是此类技术的最主要载体。目前“天网”系统在大部分部署地区仍处于监控数据采集与存储的作用阶段,在分析视频中所采集到的数据时依靠观察主体(人力),所获取到的视频数据也多用于事后取证,且效率较为低下,更难以实现对某些危险情况的预警。而随着犯罪行为的智能化和高科技化,犯罪人员的组织化和职业化趋势越来越明显,新型的犯罪形式和犯罪手段层出不穷,迫切需要一个智能化的视频监控系统来预防犯罪的发生,提高执法效率。
目前,智能视频监控系统正致力于改变原有的人工监测和手动分析的模式,对监控场景中的人体行为实时监测是监控系统的本质,落脚点在于对异常人体行为的自动识别以及对特定目标的跟踪。针对异常行为的检测与识别技术主要包括对运动目标的检测与提取、运动目标跟踪、目标特征定位、目标姿态估计判定等研究步骤和内容。目标跟踪则旨在针对特定目标的潜在危险行为进行管控。这两项技术的应用是实现本项目预警系统的首要基础。
1.2. 犯罪人员重复犯罪现象频发
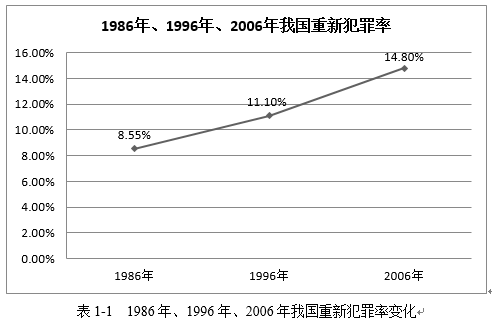
然而,目前关于视频监控的分析系统还停留在针对所采集的视频数据进行的分析上,即只会对监控里正在发生的异常行为进行预警,(不够及时,无法制止,在当前技术条件下,无法实现对有预谋的重大犯罪的,我们将关注点投向了重大刑事犯罪前科的人员)而没有对前科人员等潜在犯罪人员实施智能跟踪与再犯罪的分析。 我国《罪犯改造白皮书》曾向世界公布,我国的重新犯罪率长期控制在8%以下,但在1988年全国年平均重新犯罪率开始突破8%的控制线,达到了8.32%,1989年为8.35%。据统计,2006年底全国在押重新犯罪人员为23万余人,重新犯罪率为14.8%,从1986年至2006年二十年间重新犯罪率增长了10.88个百分点,具体走势见表1-1。
刑满释放人员重新犯罪较初次犯罪手段更为残忍,社会危害性更大,多表现出强烈的报复性与反社会性。其作案手法、作案动机、作案后果往往令人触目惊心。我国当前面临重新犯罪持续升高的压力,对刑满释放人员的保护和安置不是一项单纯的慈善救济工程,还包括对刑满释放人员不良行为的管束和强制。除了对这类人员进行再教育和再就业的辅导之外,还应该对这类特殊人群进行密切的监督,在其有犯罪意向时进行及时抓捕,遏制其犯罪行为,防止危害社会安全的重大案件的发生。
运用图像识别技术对特定目标与行为进行分析,建立具有实时分析功能的再犯罪预警系统,能高效精确地帮助公安部门对相应的社会突发状况进行有效管控,从而较大程度降低人员与财产损失,成为维护社会稳定,令人民安居乐业的有力保障。
2.项目具体方案
2.1. 总体思路
本项目旨在建立以异常行为分析为基础的再犯罪预警系统。在实现对异常行为与事件的实时监控,犯罪行为特征样本库的建立的基础之上,搭建对潜在重复犯罪行为的预警系统。实现本预警系统的总体思路如下:
2.1.1 实现对异常行为或事件的实时监控
以“天网”系统的监控数据为载体,对出现在监控内的人及人群利用基于HMM及其变种模型的行为分析方法进行行为的逐帧分析,通过对视频序列多帧图像的综合判别来确定目标在运动过程中是否存在异常行为。
2.1.2 建立犯罪行为特征样本库
根据不同地区需求,利用数据挖掘技术对指定类型的案件存档进行犯罪行为特征提取,由此建立一个综合各类犯罪行为的犯罪行为特征样本库。同时,对同一类罪行的不同犯罪特征利用经验数据进行权重分配,作为检测犯罪行为发生的基础,为预警系统提供可靠的计算依据。
2.1.3 针对特定前科人员的再犯罪预警系统
(1) 在前两点的实现基础上,搭建再犯罪预警系统;
(2) 特定前科人员进入监控范围内,即通过目标跟踪技术对其进行标记,
记录其运动轨迹和行为。利用监控记录下的运动轨迹和行为,与犯罪特征样本库进行匹配。当匹配度达到系统设定阈值时进行预警,从而实现对犯罪行为的有效管控。
2. 2. 可行性分析
本预警系统的技术难点主要存在于两个方面:视频中异常行为的识别与目标人物的追踪。
2.2.1 视频中异常行为的识别
可从相关公安部门获取异常行为片段作为训练集,采用有监督的方法进行识别。对于可能存在的训练数据较少的情况,为了提高模型的泛化能力,可运用以下两种概率模型对行为进行建模:
(1) 采用静态HMM模型,关键姿态对应状态,除了可以把人体作为1个
观测外,1个HMM也可以表示部分肢体,这使得训练更容易,同时复杂度也因为单独训练各个肢体的动态模型而降低了;
(2) 采用三维部分人体轨迹模型,对腿和胳膊等单独训练HMM,其中以
3维的轨迹作为观测,对每一个肢体,将不同动作模型的具有相似发生概率的状态联系起来以进行行为的自动分割。不过HMM模型的独立假设一般情况下是与事实不符的,但这可以通过建立给定观测下的动作类别的条件概率来克服。
2.2.2 目标人物的追踪
因为目标识别技术和基于运动信息的跟踪技术的进步,目标追踪技术得到了很大的发展。要进行目标追踪,一般需要进行两方面的研究:特征提取与目标追踪算法。
(1) 特征提取大致可以分为以下两种:
① 以目标区域的颜色直方图作为特征,因为颜色特征具有旋转不变性,
且不受目标物大小和形状的变化影响,在颜色空间中分布也大致相同;
② 目标人物的轮廓特征,轮廓特征的算法速度较快,并且在目标有小部
分遮挡的情况下同样有较好的效果。
(2) 同时可以采用基于粒子滤波的目标跟踪算法,每次通过当前的跟踪
结果重采样粒子的分布,然后根据粒子的分布对粒子进行扩散,再通过扩散的结果来重新观察目标的状态,最后归一化更新目标的状态。此算法的特点是跟踪速度特别快,而且能解决目标的部分遮挡问题,在实际工程应用过程中越来越多的被使用。
粒子滤波实现运动目标跟踪分为四个步骤:初始化提取目标人物特征;
特征搜索阶段;决策阶段;粒子重采样。其中,后三个过程的依次循环实现
了对运动目标的跟踪。各步骤具体解释如下:
① 提取目标人物特征:这个阶段需要人为选定待跟踪的目标人物,通过计算跟踪目标的特征,如目标的颜色特征,计算该区域颜色空间的直方图,以此作为描述目标的特征。
② 特征搜索阶段:初始化提取了目标的特征后,就可以去在目标的周围撒粒子搜索目标对象。撒粒子的方法有很多,例如:a) 均匀分布的放:即在整个视频画面中均匀的撒粒子;b) 在目标的附近以高斯分布来撒粒子,即靠近目标的地方多撒些,离目标较远的地方少放些。每个粒子按照初始化时候得到的目标特征计算出它所处的位置的颜色特征,并计算该直方图向量与目标的直方图向量的相似性程度。然后对每个粒子与目标计算出的相似度做归一化,使得所有粒子的相似度加起来和等于1。
③ 决策阶段:根据每个粒子与目标的相似程度做加权平均。设第 个粒子的坐标是 ,它和目标的相似度是 ,则目标的最可能的位置为:
![]()
④ 粒子重采样:粒子重采样就是根据相似度的大小重新分配粒子的个数,即在相似度最高的粒子处放更多的粒子,在相似度低的粒子那少放粒子。粒子滤波算法的核心思想就是粒子的随机采样和粒子的重要性重采样。因为不知道目标在那个位置,就随机的进行撒粒子。撒完粒子后,根据描述目标的特征相似度来计算每个粒子的相似度,然后在相似度高的地方多撒些粒子,相似度低的地方少撒粒子,这就是粒子滤波的思想。
实践表明,采用粒子滤波的目标跟踪算法可以在实际应用中取得较好的目标追踪效果。
 |
分享让更多人看到 
推荐阅读
传媒推荐
 @媒体人,新闻报道别任性
@媒体人,新闻报道别任性 网站运营者 这些"红线"不能踩!
网站运营者 这些"红线"不能踩! 一图纵览中国网络视听行业
一图纵览中国网络视听行业
相关新闻
人民日报社概况 | 关于人民网 | 报社招聘 | 招聘英才 | 广告服务 | 合作加盟 | 供稿服务 | 数据服务 | 网站声明 | 网站律师 | 信息保护 | 联系我们
服务邮箱:kf@people.cn 违法和不良信息举报电话:010-65363263 举报邮箱:jubao@people.cn
互联网新闻信息服务许可证10120170001 | 增值电信业务经营许可证B1-20060139
广播电视节目制作经营许可证(广媒)字第172号 | 互联网药品信息服务资格证书(京)-非经营性-2016-0098
信息网络传播视听节目许可证0104065 | 网络文化经营许可证 京网文[2020]5494-1075号 | 网络出版服务许可证(京)字121号 | 京ICP证000006号 | 京公网安备11000002000008号
人 民 网 版 权 所 有 ,未 经 书 面 授 权 禁 止 使 用
Copyright © 1997-2021 by www.people.com.cn. all rights reserved




-
评论

-
关注
微信微博快手
 第一时间为您推送权威资讯
第一时间为您推送权威资讯
 报道全球 传播中国
报道全球 传播中国
 关注人民网,传播正能量
关注人民网,传播正能量
