




















基于STFT滤波算法的指纹图像识别系统的设计与实现【4】
3.2.2指纹二值化方法设计
指纹图像二值化的目的是将指纹图像按照灰度阈值进行分类,将图像的前景与背景充分分离,为后续的指纹细化和特征提取做好准备。一般情况下,指纹二值化过程会将指纹模式区的脊线和谷作为指纹图像的前景,其他部分作为指纹图像的背景。
3.2.2.1区域自适应阈值法
区域自适应阈值法是最简单的二值化处理方法。其处理步骤如下:
1、动态选取指纹图像中的像素块并计算的灰度平均值G。
2、以G为阈值将该区域内的像素点进行二值化。
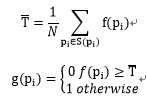
计算公式如下:
其中,f(pi)是原图像中像素pi的灰度值,g(pi)是处理后的结果,N是像素块内部的像素个数。区域自适应阈值法的特点是计算量相对较少但结果却不是很可靠。
3.2.2.2 Otsu法
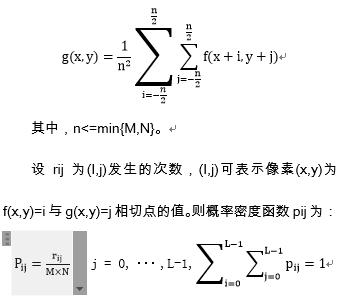
二维灰度密度直方图:设f(x,y)是灰度值,值域范围是0~L~1,L是灰度级别。在二维阈值方法中,像素值和该像素所在的区域的灰度均值都要使用。区域灰度平均值可以表示成如下形式:
需要注意的是,Otsu方法适用于对前景与背景尺度相差较小的图像进行二值化,但是由于指纹图像不满足这一要求,故Otsu方法不适用于指纹图像的二值化。
3.2.2.3本文提出的二值化算法
为了解决区域自适应阈值算法的不足之处,本文提出了一种基于前景和背景阈值迭代分析的二值化算法――双重迭代二值化算法,该方法的大致运算步骤如下:
1、根据图像平均像素灰度值设置初始化阈值T。
2、根据T将原图像的每个像素点进行分类处理,大于T的加到背景集合B中,小于等于T的加到前景集合F中。
3、对B和F集合中的像素点求平均灰度值,分别为Tb和Tf。
4、对Tb和Tf进行均值化处理,如果T与均值化后的结果T’相似,则结束算法,认为T’就是图像灰度值的阈值,根据T’来对图像采用自适应二值化处理;如果T与T’相差很大,则令T=T’,回到第二步继续执行。
这是一种类似于一维Means方法寻找二值化阈值的新算法,运行效率较高,结果可靠度也较高,属于一种兼顾效率与准确度的算法。
3.2.3指纹细化方法设计
指纹图像细化是将指纹脊线多余像素进行删除的过程,只保留脊线的骨架,在保证指纹图像的方向性、连续性和特征点不变的情况下削减指纹图像中的无用像素。指纹的细化算法应该满足收敛性,也就是多次重复调用细化算法理论上会让细化效果变的更好而不是更差。
3.2.3.1 Lam法
首先约定4个条件,G1、G2、G3、G4如下:

Lam细化方法需要按照以下步骤进行:
1、 将图像按像素相间隔的模式进行分割,分割成两个子区域。
2、 从区域一中取出像素p1,当且仅当p1满足条件G1、G2和G3时,从第一个子区域中删除像素p1。
3、 从区域二中取出像素p2,当且仅当p2满足条件G1、G2和G4时,从第二个子区域中闪出像素p2。
4、 循环操作步骤2和步骤3。
大量实验结果证明,Lam方法用于细化指纹效果非常好,细化后的图像几乎没有毛刺。
3.2.3.2改进的OPTA法
改进的OPTA法采用正方形16像素模板,这也是区别于与传统OPTA法的地方,算法描述如下:
1、 从图像的左上角元素开始,每个像素均抽取出相邻的15个像素。
2、 将其中8个相邻像素与消除模板相比较,如果全不匹配则保留该像素。
3、 如果不满足2号步骤,则将相邻像素与保留模板进行比较,如果匹配任意模板则保留像素,否则删除该像素。
4、 重复以上过程指导没有像素发生改变。
由于采用了正方形16像素模板,改进的OPTA法在消除多个像素的同时可以保证图像的连通性,而传统OPTA算法需要在删除像素时分两次判断。但缺点是是通过改进的OPTA算法来细化图像得到的结果会有较多毛刺。
3.3特征提取模块详细设计
基于细节特征点的特征提取方法主要依赖于指纹的局部细节特征和纹理方向特征。如果采集指纹的质量较差,指纹细节特征的提取就会变得相对困难,随着指纹质量的下降,情况会变得更糟。为了解决这一问题,需要将指纹的细节特征和纹理方向特征进行整合,期待能获得更好的特征提取结果。
3.3.1细节特征提取
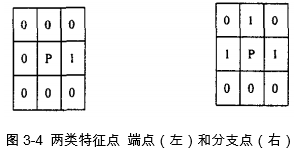
指纹图像中,一般包括有8种细节特征点。这些细节特征点按照出现频率从高到低排序为点、纹线端点、分支、眼、枝权、交叉、桥接和短线。在这8种特征点中,纹线端点和分支是最基本的特征,而其他的6种特征可看作是通过这两种特征点组合而成,因此,一般情况下认为指纹的细节特征仅仅包含纹线断电和分支点。
在对指纹图像进行细节提取之前需要对图像进行细化,这里采用正方形9像素的模板来进行特征提取。在进行特征提取之前,需要先分析特征点8个相邻像素点的特征。如图3-4所示,如果一个像素周围的8个邻接点中仅有一个值为1,其余的像素灰度值都为0,那么可以断定这个像素点就是一个端点特征点;如果一个像素周围的8个邻接点中有3个像素的灰度值为1,其余的像素灰度值为0,则可以认为这个像素点是分支点特征点。根据上述特征可以断定特征点的种类与数量。
上述提取方法的优势在于,相邻像素的指纹方向大致相同,如果能在特征点处取出纹线的方向,那么该特征点就能很好的描述整个指纹的方向信息。
 |  |
分享让更多人看到 
推荐阅读
传媒推荐
 @媒体人,新闻报道别任性
@媒体人,新闻报道别任性 网站运营者 这些"红线"不能踩!
网站运营者 这些"红线"不能踩! 一图纵览中国网络视听行业
一图纵览中国网络视听行业
相关新闻
人民日报社概况 | 关于人民网 | 报社招聘 | 招聘英才 | 广告服务 | 合作加盟 | 供稿服务 | 数据服务 | 网站声明 | 网站律师 | 信息保护 | 联系我们
服务邮箱:kf@people.cn 违法和不良信息举报电话:010-65363263 举报邮箱:jubao@people.cn
互联网新闻信息服务许可证10120170001 | 增值电信业务经营许可证B1-20060139
广播电视节目制作经营许可证(广媒)字第172号 | 互联网药品信息服务资格证书(京)-非经营性-2016-0098
信息网络传播视听节目许可证0104065 | 网络文化经营许可证 京网文[2020]5494-1075号 | 网络出版服务许可证(京)字121号 | 京ICP证000006号 | 京公网安备11000002000008号
人 民 网 版 权 所 有 ,未 经 书 面 授 权 禁 止 使 用
Copyright © 1997-2021 by www.people.com.cn. all rights reserved




-
评论

-
关注
微信微博快手
 第一时间为您推送权威资讯
第一时间为您推送权威资讯
 报道全球 传播中国
报道全球 传播中国
 关注人民网,传播正能量
关注人民网,传播正能量
