




















������е������ץȡƽ̨��2��
3.2.1 ͼ��Ԥ������������ȡ
1��ͼ��ȥ��
��ʵ�е�����ͼ�������ֻ��ʹ�������г��ܵ������豸���ⲿ�����������ŵ�Ӱ�죬��Ϊ����ͼ�������ͼ��������ͼ���������Ĺ��̳�Ϊͼ��ȥ�롣������ȥ�������У��ۺ����þ�ֵ�˲�������ֹ�˲�������̬ѧ�˲�����ʵ�ֶ�ͼ�������ȥ����
2��������ȡ
������ȡָ����ʹ�ü������ȡͼ����Ϣ������ÿ��ͼ��ĵ��Ƿ�����һ��ͼ��������������ȡ�Ľ���ǰ�ͼ���ϵĵ��Ϊ��ͬ���Ӽ�����Щ�Ӽ��������ڹ����ĵ㡢���������������������� ������ȡ��ͼ�����е�һ���������㣬Ҳ����˵���Ƕ�һ��ͼ����еĵ�һ�����㴦���������ÿ��������ȷ���������Ƿ����һ����������������һ��������㷨��һ���֣���ô����㷨һ��ֻ���ͼ�������������Ϊ������ȡ��һ��ǰ�����㣬����ͼ��һ��ͨ����˹ģ�����ڳ߶ȿռ��б�ƽ�����˺�ͨ���ֲ���������������ͼ���һ�������������ڱ���Ŀ����Ҫѡ��Ŀ�����ɫ���ԡ�������������״�����ͽǵ�������
3.2.2 ������ģ�ʹ���
�������㷨��һ�ְ���������Ķ��ǰ�����磬ͨ�����������ȥ����������ֱ��ǰ���������ɴ���������Ƹ�ǰһ����������ͻ��������������ƣ�ʵ���˽�����˵���������������źŴ����෴�ķ������ݸ���������˵Ĺ��̡������������ģʽʶ����������ģʽʶ����ȣ��������к�ǿ������Ӧ��Ϊ����ǿ���ݴ����Լ��ɿ���ʵ�ֵݹ���̵���������������������ĸ�������ģʽʶ��ɻ��������Ƿ��ִ����Եķ�������ʹ����������ģʽʶ����ռ�кܴ�����ơ�
��ṹ��ư�����
�� ���롢��������ƣ���
�� ������������ڵ��ѡ��
�� ��ʼȨֵ��ѡ��
�� ��������������
�� �������������
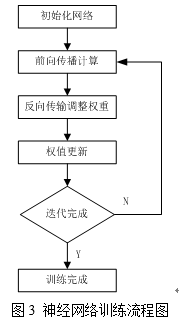
�������ѵ������ͼ��ͼ3��ʾ����Ҫ�������뷴��������С�����������㴫�����ز㣬�������ز㴦����������㣬������㽫�������Ĺ��̱���Ϊ������������������Ҫ�Ա��������������ȷ�����������������������������״̬�������ǽ����ݸ�ǰһ��Ĺ��̣�ǰһ���ÿ����Ԫ���������������Լ���Ȩֵ��
3.3����ƽ̨����
������ƽ̨��PC�˿��Ʋ��֣�ͨ����LabVIEW��д�ij�����п��ƣ�����д�ij�����Ҫ��Ҫ������¼������ܣ�
1�������Ӿ����˶������غ�������ͼ����ʾͼ���ô���ģ����ո����źš��ڱ���Ŀ�ķ�������У��������Pixy CMUcam5�Ӿ����������ô��������ŵ��ǿ���ѡ���ԵĴ������õ���Ϣ����Ϊ����������ɫΪ���ĵİ취������ʹ��ֻ�ǽ��ض���ɫ��������Ӿ����ݷ������ϵ��Ϳ���������������������Ӿ������Խ���ͼ���������Դ������ӷ����Ҷ�ϵͳ���������������С��ͬʱ���ô���������ʹ���Ա��DLL�ļ�������Ԥ��������ӿ��ж������ӷ�ʽ���ڱ���Ŀ�У�������FPVģ��ͼ�����Ӻ���ͼ��ɼ�����ʵ����LabVIEW������ʵ����Ƶ�źŵĴ�������ա�
2����LabVIEW�ϣ�������OpenCV��д���ɵ�DLL�ļ���ɶԵ��λ�õ����굽���������ת���Լ��Զ�Ӧ�ĸ��������ǵļ��㣬���¼��ṹ�ж�����Ƿ�����������ݣ�ͨ�������ؼ��л�����ģʽ��
3������������źŻ�����Ӧ��ģʽѡ����źŷ���ִ�в��֡�ͨ����PC���Ͻ���2.4G���ߴӶ�ͨ��LabVIEW�ϵĸ���ģ�齫����õ����źŷ����ִ�л�����Ϊ��Ӧ�Գ��ֵ��źŹ��ʲ����������ƻ��ɹ��źŷŴ������źŽ��зŴ�
4����Ŀʵʩ�ɹ�
4.1��������
4.1.1�����˹����ռ����
�����˹����ռ��ǻ����˲������Ĺ��������Ǻ������������ܵ���Ҫָ�ꡣ�ڻ���������У������ռ�ķ���������Ҫ���ã��������˻����˵�����ߴ硣�����˹����ռ���Զ���Ϊĩ��ִ�����ܹ���������е�ļ��ϣ������������˹����ռ�������ʮ�ָ��ӵ����⣬���ںܴ�̶��������ڻ�����λ�ý⡣Ŀǰ�������������ռ��ȷ����Ҫ�н���������ֵ�����ַ��������IJ��ý���������ֵ�����ϵķ���ȷ��������ժ�����˹����ռ䣬���� Matlab��̣����ƹ����ռ�ı߽�ͼ�Ρ�
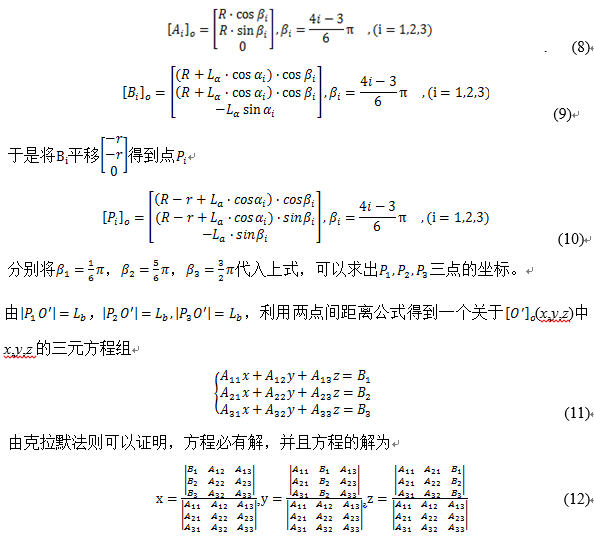
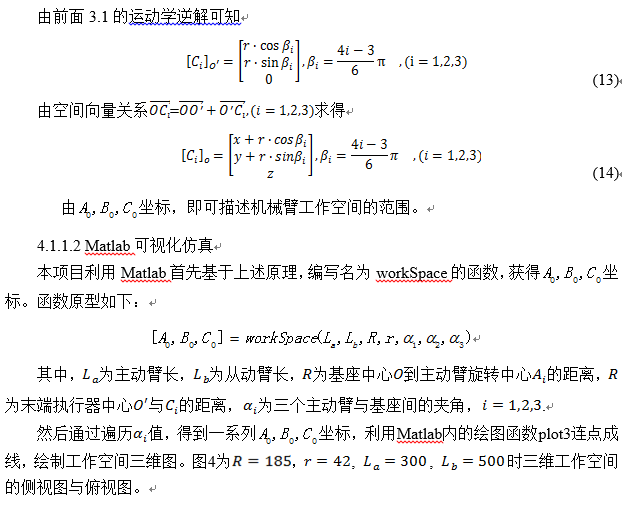
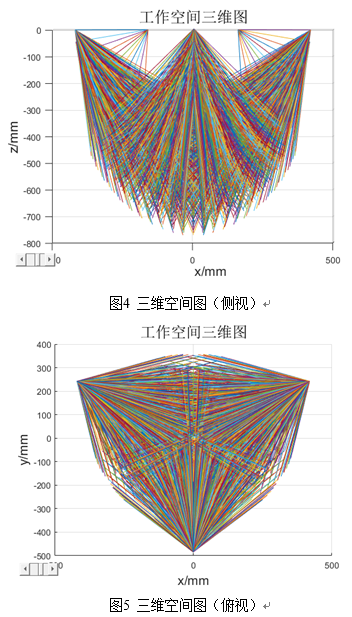
4.1.1.1ȷ�������˹����ռ�
��3.1���˶�ѧ��������֪
 |  |
�����ø����˿��� 
�Ƽ��Ķ�
��ý�Ƽ�
 @ý���ˣ����ű���������
@ý���ˣ����ű��������� ��վ��Ӫ�� ��Щ"����"���ܲȣ�
��վ��Ӫ�� ��Щ"����"���ܲȣ� һͼ�����й�����������ҵ
һͼ�����й�����������ҵ
�������
�����ձ���ſ� | ���������� | ������Ƹ | ��ƸӢ�� | ������ | �������� | ������� | ���ݷ��� | ��վ���� | ��վ��ʦ | ��Ϣ���� | ��ϵ����
�������䣺kf@people.cn Υ���Ͳ�����Ϣ�ٱ��绰��010-65363263 �ٱ����䣺jubao@people.cn
������������Ϣ��������֤10120170001 | ��ֵ����ҵ��Ӫ����֤B1-20060139
�㲥���ӽ�Ŀ������Ӫ����֤����ý���ֵ�172�� | ������ҩƷ��Ϣ�����ʸ�֤�飨����-�Ǿ�Ӫ��-2016-0098
��Ϣ���紫��������Ŀ����֤0104065 | �����Ļ���Ӫ����֤ ������[2020]5494-1075�� | ��������������֤��������121�� | ��ICP֤000006�� | ����������11000002000008��
�� �� �� �� Ȩ �� �� ��δ �� �� �� �� Ȩ �� ֹ ʹ ��
Copyright © 1997-2021 by www.people.com.cn. all rights reserved




-
����

-
��ע
��������
 ��һʱ��Ϊ������Ȩ����Ѷ
��һʱ��Ϊ������Ȩ����Ѷ
 ����ȫ�� �����й�
����ȫ�� �����й�
 ��ע������������������
��ע������������������
