




















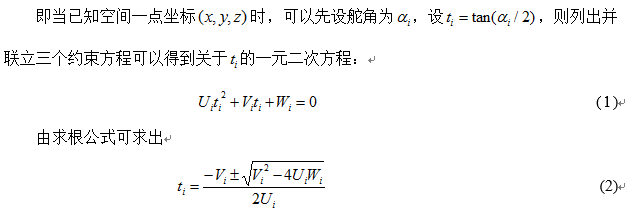
ВЂСЊЛњаЕЪжжЧФмзЅШЁЦНЬЈ
еЊвЊЃКЛљгкDeltaВЂСЊЛњаЕЪжДДаТВЩгУСЫаќЙвЪНЛњЙЙЃЌЩшМЦГЩЮЊДѓЗЖЮЇзЅШЁЛњдиЦНЬЈЁЃЭЈЙ§ОэЛ§ЫуЗЈЩшМЦСНИіЫузгЬсШЁЬнЖШЭМЯёЃЌЖдЭМЯёЬнЖШЗНЯђНјааЬнЖШДѓаЁЕФвЦЖЏВЂНјааЯёЫиЕўМгЃЌПЩвдПьЫйЪеСВжСД§ЪЖБ№ЧђаФЁЃЬсИпСЫЯЕЭГЖдЧђЕФЪЖБ№ОЋШЗЖШКЭЯЕЭГТГАєадЁЃЩёОЭјТчгЕгаСМКУЕФЗЧЯпадБЦНќЬиадКЭздЪЪгІЁЂздбЇЯАФмСІЃЌРћгУЛњЦїбЇЯАЩёОЭјТчЕФбЕСЗЃЌНјЖјПЩЭъГЩЖдГЁОАФПБъЕФзМШЗЪЖБ№КЭзЅШЁШЮЮёЃЌЙЙНЈГЩвЛИіжЧФмЛЏЕФЛњаЕЪжзЅЦНЬЈЁЃ
ЙиМќДЪЃКВЂСЊЛњаЕЪжЃЛЩёОЭјТчЃЛЬнЖШЮЛвЦЃЛзЅШЁ
1. ЯюФПМђНщ
ФПЧАВЂСЊЛњаЕЪжвђЦфадФмИпЁЂГЩБОЕЭЁЂИКжиБШДѓЁЂЙпСПЕЭЁЂЖЏЬЌадФмКУЁЂдЫЖЏОЋЖШИпЕШгХЕуЃЌЗЂеЙбИЫйЁЃжкЖрбаОПепдкВЂСЊЛњаЕЪжЛњЙЙЩЯХфвдМЦЫуЛњЪгОѕЯЕЭГЃЌЪдЭМДяЕНЖдФПБъЮяЬхЕФздЖЏЪЖБ№ЁЂИњзйгызЅЗХЁЃЕЋФПЧАЛљгкВЂСЊЛњаЕЪжЕФЭМЯёДІРэЫуЗЈНіФмТњзуФПБъЪЖБ№ЕФЛљБОаЇЙћЃЌШБЗІОЋЖШМАПЩвЦжВадЁЃ
ЩёОЭјТчвђЦфСМКУЕФЗЧЯпадБЦНќЬиадКЭздЪЪгІЁЂздбЇЯАФмСІЖјГЩЮЊЛњЦїШЫЪгОѕЫХЗўЕФбаОПШШЕуЁЃРћгУЛњЦїбЇЯАжаЕФЯрЙиЭГМЦбЇЯАЗНЗЈЬсШЁФПБъЕФЬиеїаХЯЂВЂЭъГЩЖдЩёОЭјТчЕФбЕСЗЃЌНјЖјЭъГЩЖдГЁОАФПБъЕФзМШЗЪЖБ№КЭзЅШЁШЮЮёЃЌЙЙНЈвЛИіжЧФмЛЏЕФЛњаЕЪжзЅШЁЦНЬЈГЩЮЊПЩФмЁЃ
БОЯюФПжМдкЩшМЦЪЕЯжзМШЗИпаЇЕФВЂСЊЛњаЕЪжЃЌВЂдкДЫЛљДЁЩЯЙЙНЈжЧФмЭМЯёДІРэЦНЬЈЃЌВЩгУЛњЦїбЇЯАЫуЗЈНсКЯЩёОЭјТчЕФЗНЗЈгУгкЭъГЩИДдгЮяЬхЕФздЖЏЪЖБ№ЁЂИњзйгызЅЗХЃЌЪЕЯжВЂСЊЛњаЕЪжЕФжЧФмЛЏЁЃЦфжаЃЌРћгУЩёОЭјТчКЭЛњЦїбЇЯАЯрНсКЯЕФЗНЗЈЃЌФмгааЇЕиЬсШЁЬиеїВЂМгШЈЃЌЭЌЪБЪЙЮѓВюНЕЕНзюЕЭЃЌОпгаСМКУЕФНЁзГадЃЌФмТњзузАжУЕФИпОЋЖШКЭЖржжЛЗОГЕФЙЄзїашЧѓЁЃ
3. ЯюФПЗНАИ
ЛљгкВЂСЊЛњаЕЪжЕФжЧФмзЅШЁЦНЬЈжївЊРћгУЭМЯёДІРэКЭЛњЦїбЇЯАЕФЯрЙи РэТлЃЌЪЕЯжЖдГЁОАжаБЛзЅШЁФПБъЕФЬиеїЬсШЁЁЂЬиеїбЇЯАКЭФПБъзЫЬЌХаЖЈЃЌШЛКѓЧ§ЖЏЛњаЕЪжБлзЅШЁЬиЖЈЕФФПБъЁЃдкЯюФПбажЦЙ§ГЬжаЃЌашвЊжиЕуНтОівдЯТСНИіЗНУцЕФЮЪЬтЃКЛњаЕБлЩшМЦКЭЛљгкЭМЯёДІРэЕФФПБъзЅШЁЁЃЦфжаЃЌдкЛњаЕБлЩшМЦЗНУцЃЌашвЊЭъГЩЛњаЕЪжЕФНЈФЃКЭЪмСІЗжЮіЙЄзїЃЌЭЌЪБПМТЧЕНЛњаЕЪжФмЙЛЪЪгІВЛЭЌЕФгІгУГЁОАЃЌашвЊЖдЛњаЕБлЕФзЅШЁПеМфНјааКЯРэВМОжКЭгХЛЏЁЃдкФПБъзЅШЁЙ§ГЬжаЃЌашвЊПМТЧФПБъЕФЬиеїаХЯЂЁЂЩёОЭјТчФЃаЭЕФЙЙНЈКЭбЕСЗЃЌвдМАШчКЮПижЦЛњаЕБлЪЕЯжзМШЗЁЂПьЫйЕФФПБъзЅШЁШЮЮёЁЃЭЈЙ§ЩшМЦКЯРэЕФММЪѕТЗЯпКЭбаОПЗНАИЃЌзюжеПЊЗЂГівЛЬзФмЙЛПьЫйЁЂзМШЗЧвОпгажЧФмадЕФЛњЦїШЫзЅШЁЦНЬЈЁЃ
3.1ЛњаЕВПЗж
ЛњаЕВПЗжНЈСЂдкDeltaЛњЙЙВЂСЊЛњаЕЪжЛљДЁжЎЩЯЃЌЭЌЪБЖдЛњаЕзАжУМгвдИФНјвдРЉДѓЛњаЕЪжЕФЙЄзїЗЖЮЇЁЃдЫгУSolidWorksЖдећЬхЛњаЕНсЙЙНјааНЈФЃЃЌВЂЭЈЙ§Ansys WorkbenchЖдЪмСІЧщПіЁЂЦЃРЭЖШЕШНјааЗжЮіЃЌШЗШЯзюгХЗНАИЁЃ
ЖцНЧЕФМЦЫуЃКгЩгкБОЯюФПВЩгУЕФЪЧЪЧШ§здгЩЖШDeltaВЂСЊЛњаЕЪжЃЌЖдгкШ§здгЩЖШ Delta ВЂСЊЛњаЕЪжЖјбдЃЌЦфдЫЖЏбЇФцНтвЛАуЖМБШНЯШнвзЃЌЭЈГЃПЩвджБНггУвЛИіНтЮіБэДяЪНРДУшЪіетжждЫЖЏбЇФцНтЙиЯЕЁЃ

ЭъГЩФПБъЕФЮЛжУНјааЖЈЮЛжЎКѓЃЌЛљгкЮЛжУЕФЪгОѕЖЈЮЛИљОнФПБъЯрЖдгкЛњаЕБлЕФЮЛзЫКЭдЫЖЏзДЬЌЃЌПЩРћгУЩЯЪНПЩЭЦЕМГідкФПБъзјБъЯТШ§ИіЖцЛњЕФРэТлзЊНЧЃЌИјГіЛњаЕБлдкжљзјБъЯЕФкЕФдЫЖЏжИСюВЂЗЂЫЭИјЯТЮЛЛњЁЃРћгУSTM32ЪфШыВЖЛёНгЪеаХКХЃЌЪфГіPWMВЈПижЦЛњаЕБлзЅШЁФПБъЁЃ
3.2ЭМЯёДІРэВПЗж
дкРћгУЛњЦїбЇЯАКЭЩёОЭјТчЪжЖЮЙЙНЈжЧФмзЅШЁЦНЬЈЕФЙ§ГЬжаЃЌОпЬхЕФММЪѕТЗЯпШчЭМ1ЫљЪОЁЃ
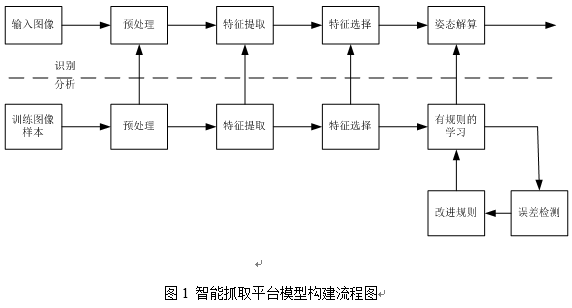
ИУЙ§ГЬгЩЩЯАыВПЗжЕФЪЖБ№КЭЯТАыВПЗжЕФЗжЮіЙЙГЩЃКЪЖБ№ВПЗжЭъГЩЖдЪфШыЭМЯёЕФдЄДІРэЁЂЬиеїЬсШЁЁЂЬиеїбЁдёКЭзЫЬЌНтЫуЃЛЗжЮіВПЗжЭъГЩЖдбЕСЗбљБОЕФдЄДІРэЁЂЬиеїЬсШЁЁЂЬиеїбЁдёКЭЙцдђбЇЯАЃЌзюжеЙЙНЈвЛИіОпгажЧФмадЕФЩёОЭјТчФЃаЭЁЃЭМПђгвЯТНЧВПЗждђЮЊздЪЪгІДІРэВПЗжЃЌМДЭЈЙ§бЕСЗбљБОИјГіХаЖЈЙцдђЃЌдйЖддбЕСЗбљБОНјаавРДЮМьВтЃЌХаЖЯгаЮоЮѓВюЃЌНјЖјВЛЖЯИФНјХаБ№ЙцдђЃЌвЛжБДяЕНвЊЧѓНсЪјЁЃ
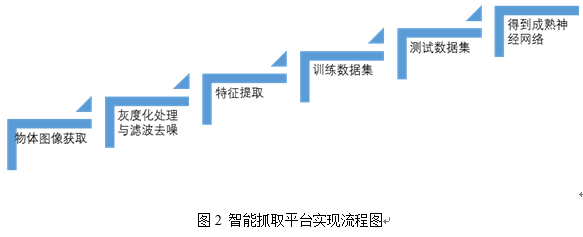
ЮЊСЫЪЕЯжЛњЦїШЫвРОнЪгОѕаХЯЂЖдШ§ЮЌПеМфФПБъЮяЬхЕФзЅШЁЃЌашвЊДгЩуЯёЛњЛёШЁЕФЖўЮЌЭМЯёжаЬсШЁГіФПБъЕФЬиеїаХЯЂЁЃЛњЦїШЫЪгОѕЯЕЭГЕФЙиМќММЪѕЪЧЖдФПБъЪЕЪБЁЂзМШЗЕФЬсШЁЃЌЖјФПБъЬсШЁЕФЪЕжЪЪЧЭМЯёЗжИюЁЃБОВПЗжвдВЂСЊЛњаЕЪжЮЊЦНЬЈЃЌЖдВЩМЏЕФЭМЯёНјааЯрЙиДІРэЃЌЬсШЁГіФПБъЮяЬхЕФгагУЬиеїЁЃШЛКѓЃЌВЩгУЩёОЭјТчбЕСЗВтЪдбљБОЃЌЭъГЩСЫДгЭМЯёПеМфЕНЩуЯёЛњПеМфЕФзјБъзЊЛЛЃЌЪЕЯжСЫЛњЦїШЫИљОнЪгОѕаХЯЂЖдШ§ЮЌПеМфФПБъЕФЖЈЮЛЁЃЛњЦїбЇЯАЩёОЭјТчЕФЩшМЦЪЕЯжПЩЗжЮЊ 3ИіНзЖЮЃЌбљБОЭМЯёЛљБОДІРэЁЂЩёОЭјТчбЕСЗКЭВтЪдгХЛЏЁЃЭМЯёЕФЛљБОДІРэЙ§ГЬАќРЈЭМЯёЛёШЁЁЂЛвжЕЛЏгыТЫВЈЁЂЭМЯёЗжИюКЭЭМЯёдіЧПЕШЁЃБОВПЗжЕФЛљБОСїГЬШчЭМ2ЫљЪОЃК
 |
ЗжЯэШУИќЖрШЫПДЕН 
ЭЦМідФЖС
ДЋУНЭЦМі
 @УНЬхШЫЃЌаТЮХБЈЕРБ№ШЮад
@УНЬхШЫЃЌаТЮХБЈЕРБ№ШЮад ЭјеОдЫгЊеп етаЉ"КьЯп"ВЛФмВШЃЁ
ЭјеОдЫгЊеп етаЉ"КьЯп"ВЛФмВШЃЁ вЛЭМзнРРжаЙњЭјТчЪгЬ§аавЕ
вЛЭМзнРРжаЙњЭјТчЪгЬ§аавЕ
ЯрЙиаТЮХ
ПЭЛЇЖЫЯТди
ШЫУёШеБЈЩчИХПі | ЙигкШЫУёЭј | БЈЩчеаЦИ | еаЦИгЂВХ | ЙуИцЗўЮё | КЯзїМгУЫ | ЙЉИхЗўЮё | Ъ§ОнЗўЮё | ЭјеОЩљУї | ЭјеОТЩЪІ | аХЯЂБЃЛЄ | СЊЯЕЮвУЧ
ЗўЮёгЪЯфЃКkf@people.cn ЮЅЗЈКЭВЛСМаХЯЂОйБЈЕчЛАЃК010-65363263 ОйБЈгЪЯфЃКjubao@people.cn
ЛЅСЊЭјаТЮХаХЯЂЗўЮёаэПЩжЄ10120170001 | діжЕЕчаХвЕЮёОгЊаэПЩжЄB1-20060139
ЙуВЅЕчЪгНкФПжЦзїОгЊаэПЩжЄЃЈЙуУНЃЉзжЕк172КХ | ЛЅСЊЭјвЉЦЗаХЯЂЗўЮёзЪИёжЄЪщЃЈОЉЃЉ-ЗЧОгЊад-2016-0098
аХЯЂЭјТчДЋВЅЪгЬ§НкФПаэПЩжЄ0104065 | ЭјТчЮФЛЏОгЊаэПЩжЄ ОЉЭјЮФ[2020]5494-1075КХ | ЭјТчГіАцЗўЮёаэПЩжЄЃЈОЉЃЉзж121КХ | ОЉICPжЄ000006КХ | ОЉЙЋЭјАВБИ11000002000008КХ
ШЫ Уё Эј Ац ШЈ Ыљ га ЃЌЮД О Ъщ Уц Ък ШЈ Нћ жЙ ЪЙ гУ
Copyright © 1997-2021 by www.people.com.cn. all rights reserved




-
ЦРТл

-
ЙизЂ
ЮЂаХЮЂВЉПьЪж
 ЕквЛЪБМфЮЊФњЭЦЫЭШЈЭўзЪбЖ
ЕквЛЪБМфЮЊФњЭЦЫЭШЈЭўзЪбЖ
 БЈЕРШЋЧђ ДЋВЅжаЙњ
БЈЕРШЋЧђ ДЋВЅжаЙњ
 ЙизЂШЫУёЭјЃЌДЋВЅе§ФмСП
ЙизЂШЫУёЭјЃЌДЋВЅе§ФмСП
