




















并联机械手智能抓取平台【6】
4.3算法设计
4.3.1梯度位移算法
为了减少圆球图像的噪声干扰,首先对采集的图像进行了增强和平滑。首先,对图像进行直方图均衡化,减少高亮与阴影对圆球轮廓识别的干扰;然后对图像进行高斯滤波,去除正态分布的高斯噪声;接着进行形态学滤波,填充物体内细小空洞,连接邻近物体,平滑其边界。
调用OpenCV的filter2D函数对预处理完毕的图像进行卷积处理,提取图像梯度信息。定义两个卷积核:
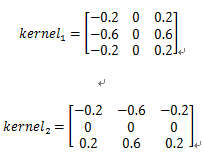
分别对样本灰度图进行卷积,得到x方向梯度图与y方向梯度图;然后将两图输入进行坐标转换,得到极坐标下梯度图mag。
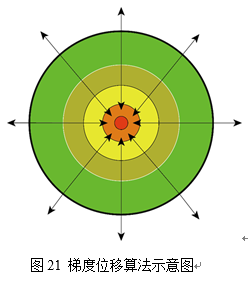
如图,在一定半径圆周上遍历轮廓像素点,并根据其梯度方向,在相应半径大小位移的像素点叠加该梯度值,经过数次迭代,无关轮廓发散,圆轮廓收敛至一高亮像素点,即为所寻球心点。
4.3.2神经网络构建训练
4.3.2.1图像采集与预处理
项目主要完成红、黑、粉、蓝、棕、绿、黄各种颜色的球的识别与抓取,首先对以上颜色的球分别采集各125个样本,非球负样本采集125个,共1000个样本。其中600个样本作为训练集,检验集与测试集各200个。
如梯度位移算法所示对图像进行预处理,最后分割感兴趣部分储存为特定大小。

4.3.2.2神经网络模型构建
4.3.2.2.1特征提取
(1)针对圆球,核心的特征为颜色特征和轮廓特征。其中,颜色特征提取方面,综合考量RGB颜色空间和HSV颜色空间。下面由R、G、 B、H、S、V分别表示RGB模型和HSV模型的各个分量,设计三个特征作为神经网络输入参数。由于不同颜色空间本身所具有的缺陷,直接以各分量数值形式作为颜色特征进行神经网络训练,不能得到理想的效果。
经过理论分析和实验,初步选定的有效的颜色特征是:
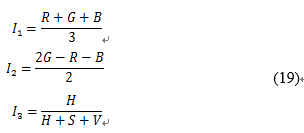
(2)对于球的识别,其圆形轮廓特征同样重要。根据梯度位移算法中所得的轮廓梯度图,确定输入的第四个特征即为
![]()
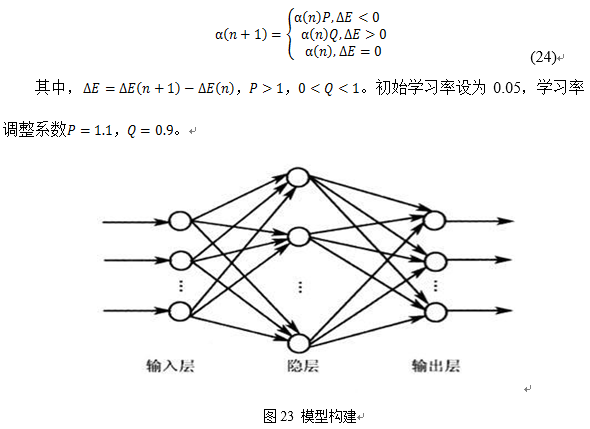
4.3.2.2.2模型构建
(1)输入层
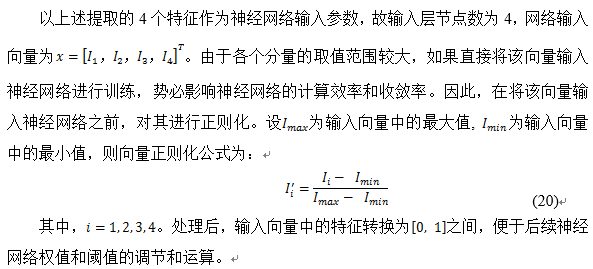
(2)输出层
因训练分类器识别红、黑、粉、蓝、棕、绿、黄7种颜色的球,输出层节点数为8,其中一个节点对应非球类。网络输出向量y为8x1的向量,输出各个分量值为0或1,每个输出结果有且仅有一个分量为1。
(3)隐含层
一般确定隐含层节点数目的基本原则是在满足精度要求的前提下取尽可能紧凑的结构,即取尽可能少的隐含节点数。本文可以通过以下公式并且多次试凑来实现:
![]()
其中,n为输入层节点数,m为输出层节点数,s为隐含层节点数, 为 之间的整数。初步试验确定隐含层节点数为7。
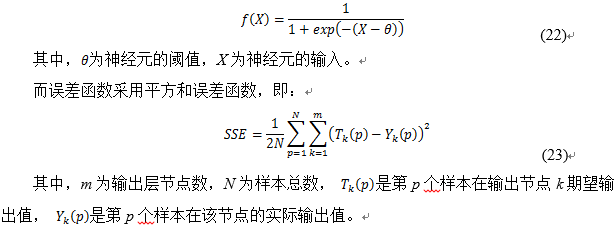
(4)激励函数与误差函数
网络内每个神经元的激励函数均Sigmoid为型作用函数,即:
(5)初始权值与期望误差
初始权值取一些-1到1之间的不同的小随机数。小随机数用来保证网络不会因为权值过大而提前进入局部极小点;不同用来保证网络可以正常学习,如果用相同的权值初始化矩阵,网络将无学习能力。
期望误差的选定在0.0001-0.01之间。
(6)学习率
学习率的选择与收敛速度之间存在着极大的矛盾。在曲面的平坦区,学习率较小,使得迭代次数增加,收敛速度及其缓慢。而在变化剧烈的地方学习率较大,又会使误差增加,反而使迭代次数增加,影响了收敛速度。为了解决学习率与收敛速度之间的矛盾,可以根据误差变化的趋势动态改变学习率,即自适应改变学习率。算法主要思想:先设一初始学习率,若一次迭代后误差增加,则将学习率乘以一个小于的常数,若一次迭代后误差减少,则将学习系数乘以一个大于的常数,这样既不增加太多的计算量,又使学习率得到合理的调整。这里,一个样本学习后并不调整学习率,而是在整个训练样本库学习一次后再调整学习率,即采用批处理方式调整学习率。具体公式如下:
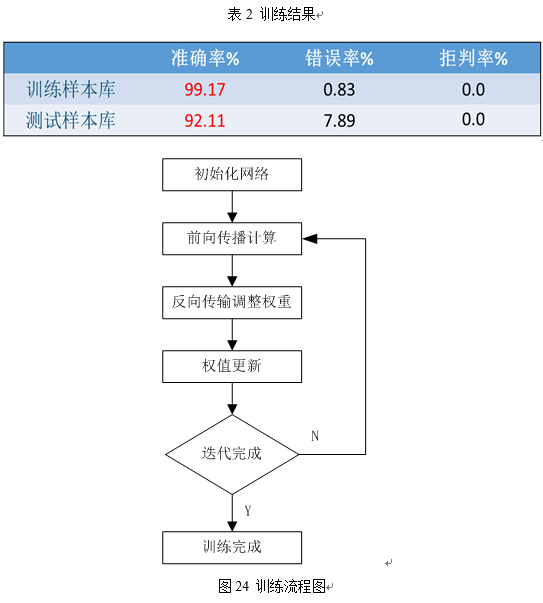
4.3.2.3训练与测试
神经网络的训练流程图如图所示,主要由正向传播与反向传导交替进行。正向传播结束后,需要对比正向传播的输出与正确结果的误差,反向传播将误差传递给前一层的过程,前一层的每个单元根据误差情况更新自己的权值。
按流程图进行训练,表给出了网络训练结束后,对训练样本库和测试样本库分别进行测试的结果。训练样本库的准确率为99.17%,测试样本库的准确率为92.11%,拒判率为0.0%。
从实验结果来看,网络不仅对已学习的样本有较好的识别能力,而且对未知样本还有良好的预知能力。
5.研究结论
经研究,采用悬挂式并联机械结构,与现有机构相比,通过改进后,降低了机械手的重心,提高机构整体的稳定性。使其系统稳定性大大增强,可搭载至无人机完成复杂任务。
通过卷积算法设计两个算子提取梯度图像,对图像梯度方向进行梯度大小的移动并进行像素叠加,可以快速收敛至高亮处(即待识别球心)。该算法与传统霍夫圆变换算法相比既降低了运算量,同时也大大提高了系统对球的识别精确度和系统鲁棒性。
神经网络因其良好的非线性逼近特性和自适应、自学习能力而成为机器人视觉伺服的研究热点。利用机器学习中的相关统计学习方法提取目标的特征信息并完成对神经网络的训练,进而可完成对场景目标的准确识别和抓取任务,构建一个智能化的机械手抓平台。
 |
分享让更多人看到 
推荐阅读
传媒推荐
 @媒体人,新闻报道别任性
@媒体人,新闻报道别任性 网站运营者 这些"红线"不能踩!
网站运营者 这些"红线"不能踩! 一图纵览中国网络视听行业
一图纵览中国网络视听行业
相关新闻
人民日报社概况 | 关于人民网 | 报社招聘 | 招聘英才 | 广告服务 | 合作加盟 | 供稿服务 | 数据服务 | 网站声明 | 网站律师 | 信息保护 | 联系我们
服务邮箱:kf@people.cn 违法和不良信息举报电话:010-65363263 举报邮箱:jubao@people.cn
互联网新闻信息服务许可证10120170001 | 增值电信业务经营许可证B1-20060139
广播电视节目制作经营许可证(广媒)字第172号 | 互联网药品信息服务资格证书(京)-非经营性-2016-0098
信息网络传播视听节目许可证0104065 | 网络文化经营许可证 京网文[2020]5494-1075号 | 网络出版服务许可证(京)字121号 | 京ICP证000006号 | 京公网安备11000002000008号
人 民 网 版 权 所 有 ,未 经 书 面 授 权 禁 止 使 用
Copyright © 1997-2021 by www.people.com.cn. all rights reserved




-
评论

-
关注
微信微博快手
 第一时间为您推送权威资讯
第一时间为您推送权威资讯
 报道全球 传播中国
报道全球 传播中国
 关注人民网,传播正能量
关注人民网,传播正能量
