




















并联机械手智能抓取平台【3】
4.1.2优化机械参数
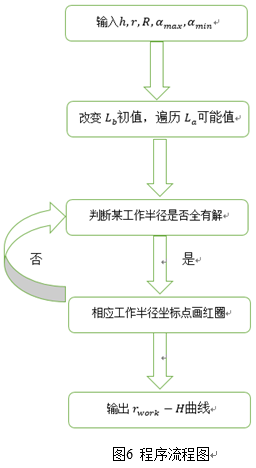
基于并联机械手的位置逆解,可以判断某点是否属于解空间;项目利用位置逆解原理,用Matlab编写findWorkableAns函数,返回特定输入半径的解情况,有解返回1,无解返回0。函数原型如下:

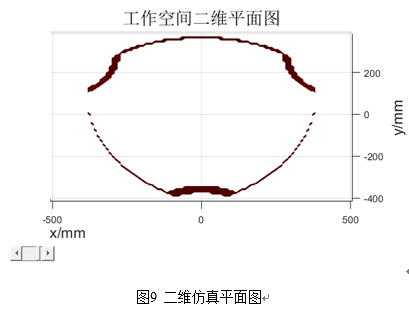
如图9所示,抓取工作范围为三轴对称的椭圆型,机械臂处范围由于限位有凹缺,整体工作半径约为380mm。
图像显示工作半径与优化结果一致,优化结果满足工作需要,且各个参数配比合理,Matlab仿真优化工作到此结束。
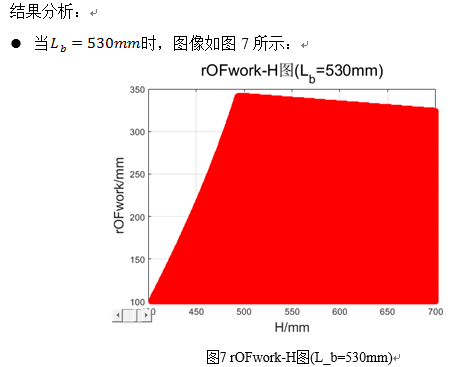
 |  |
分享让更多人看到 
推荐阅读
传媒推荐
 @媒体人,新闻报道别任性
@媒体人,新闻报道别任性 网站运营者 这些"红线"不能踩!
网站运营者 这些"红线"不能踩! 一图纵览中国网络视听行业
一图纵览中国网络视听行业
相关新闻
人民日报社概况 | 关于人民网 | 报社招聘 | 招聘英才 | 广告服务 | 合作加盟 | 供稿服务 | 数据服务 | 网站声明 | 网站律师 | 信息保护 | 联系我们
服务邮箱:kf@people.cn 违法和不良信息举报电话:010-65363263 举报邮箱:jubao@people.cn
互联网新闻信息服务许可证10120170001 | 增值电信业务经营许可证B1-20060139
广播电视节目制作经营许可证(广媒)字第172号 | 互联网药品信息服务资格证书(京)-非经营性-2016-0098
信息网络传播视听节目许可证0104065 | 网络文化经营许可证 京网文[2020]5494-1075号 | 网络出版服务许可证(京)字121号 | 京ICP证000006号 | 京公网安备11000002000008号
人 民 网 版 权 所 有 ,未 经 书 面 授 权 禁 止 使 用
Copyright © 1997-2021 by www.people.com.cn. all rights reserved




-
评论

-
关注
微信微博快手
 第一时间为您推送权威资讯
第一时间为您推送权威资讯
 报道全球 传播中国
报道全球 传播中国
 关注人民网,传播正能量
关注人民网,传播正能量
